Dec. 22, 2015





トヨタ自動車、自動運転の早期実現を可能にする地図自動生成システムを開発
-2020年頃に実用化を目指し開発中の自動運転車両に適応-
トヨタ自動車(株)(以下、トヨタ)は、2016年1月6日(水)~9日(土)に米国ネバダ州ラスベガスで開催する2016 International CESにおいて、市販車に搭載しているカメラやGPSを活用して、自動運転の走行に必要となる高精度地図を自動的に生成する「地図自動生成システム」を展示する。
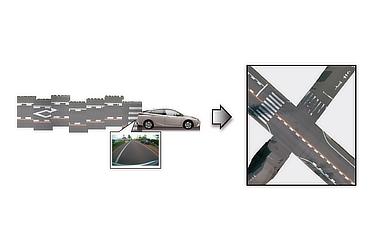
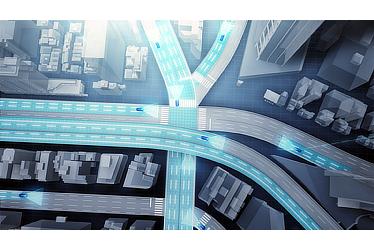
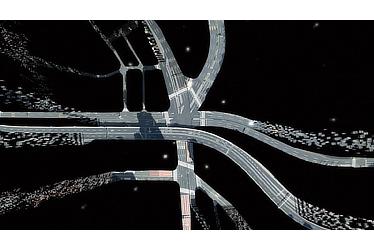
本システムは、カメラを装着した車両が走行中に収集した路面の画像データと位置情報をデータセンターに集約し補正することで、自動的に広域の高精度地図データを作成。将来の自動運転車の走行に役立てる。
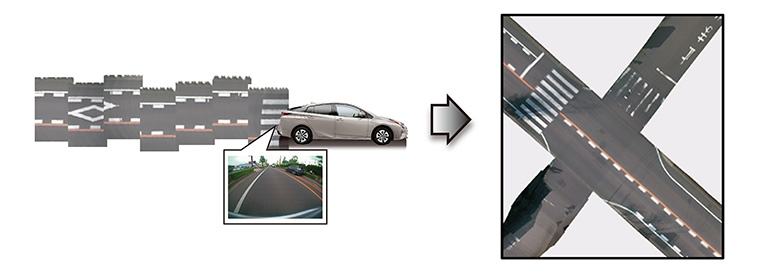
地図自動生成イメージ
自動運転の実現のためには、自車位置情報*1、道路構造や交通ルール(制限車速や各種標識)を把握することが欠かせない。さらにその情報は、定期的に更新することが求められている。これまでは3次元レーザースキャナーを搭載した計測車両が実際に市街地や高速道路を走行しデータ収集していたため、地図の更新頻度が少なく、情報鮮度の高い地図は得られなかった。また、道路の白線や標識などは人手をかけて専用地図データを作成していたため、多大なコストがかかっていた。
今回開発したシステムは、(株)豊田中央研究所が開発した空間情報の自動生成技術「COSMIC*2」を採用し、車両から収集した画像データとGPS信号から高精度地図データを生成する。車載カメラとGPSから収集するデータは誤差が大きいが、走行軌跡を高精度に推定する技術と、複数車両から収集した路面画像データを統合・補正する技術により、位置誤差を解消(直線路の場合で誤差5cm以内)。さらに情報収集に市販車両や既存インフラを活用することで、リアルタイムにデータ更新が可能で、かつ安価なシステム構築も可能となる。
本システムは、トヨタが2020年頃に実用化を目指し開発中の自動車専用道路での自動運転で必要となる重要な要素技術の一つであり、将来的には一般道や道路上の障害物への対応など、機能を拡張していく。また、高精度地図データの公共・民間サービスへの活用も視野に、地図メーカーとの連携も強化していく。
トヨタは2015年10月、自動運転の考え方を「Mobility Teammate Concept」として発表。人とクルマが同じ目的で、ある時は見守り、ある時は助け合う、気持ちが通った仲間(パートナー)のような関係を築き、クルマを操る楽しさと自動運転を両立させることをトヨタ独自の自動運転の考え方とした。
トヨタはすべての人が、安全、スムース、自由に移動できる社会の実現を目指し、自動運転に貢献する技術の開発を強化していく。
| *1 | 白線や縁石など路面の特徴を含む高精度地図と、実際の周囲の状況を照合することで、精度高く自車位置を判別する |
|---|---|
| *2 |
|
以上
ダウンロード(動画)
-
-


- 地図自動生成システム・イメージ映像
-

ダウンロード(画像)
-
-
- 地図自動生成システム
-
-
-
- 地図自動生成システム
-
-
-
- 地図自動生成システム
-
-
-
- 地図自動生成システム
-
-
-
- 地図自動生成システム
-
