2017年09月27日




5. 自動運転車開発に対するアプローチ
この数十年、車両の自動化は、ますます進展しました。加速やブレーキといった主要機能は、コンピュータによって制御されるようになっています。最近では、自動車を車線内から逸脱しないようにしたり、衝突を回避するために車両の動きの一部を制御したり、安全性を向上させる、新しい技術が登場しています。
一部あるいは、全ての運転動作を実行するシステムの開発に伴い、これらを表現するためのいろいろな用語が使われ始めました。こうした用語として、「自動化(automated)」、「高度な自動化(highly automated)」、「準(semi-)自動化」、「部分的な(partially)自動化」、「自動運転(self-driving)」、「ドライバーレス(driverless)」などが挙げられます。
トヨタは、一般的に、人がほとんどあるいは全く、直接のコントロールにかかわらない車両の機能を「オートメーテッド」という言葉で表現しています。逆に「オートノマス」という言葉は、自動化されたシステムが常に運転操作を行う車両にのみ使っています。
一方、世の中ではドライバーの監視や運転上の責任がない、真に「自律(オートノマス)」していないクルマについても「オートノマス・ヴィークル」という言葉で表現していますが、用語の使い方は、消費者の期待と車両並びに車両技術の機能に対する理解に影響を与えるため、重要です。トヨタは、このような技術を乗用車に導入する際、車両の実際の機能をより正確に表現すること、あるいはそれぞれの用語が意味する通りに使うことが重要だと考えています。
「オートメーテッド」であれ、「オートノマス」であれ、新たに開発されている車両の性能に投入される研究の範囲を一言で表現するには不十分です。このような理由から、基本線をそろえるため、国際的な基準(レベル)が設けられています。
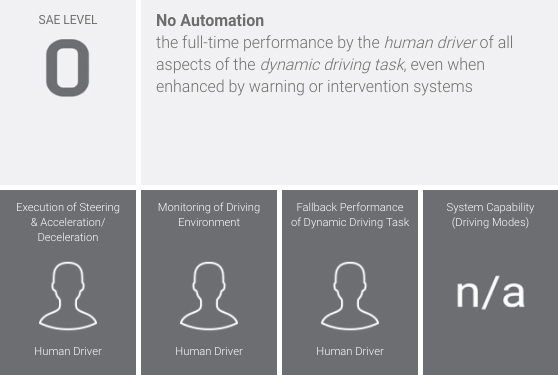
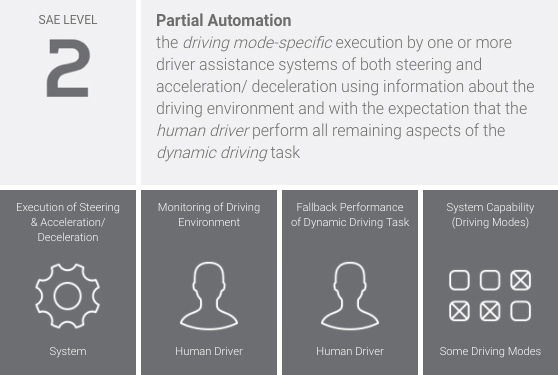
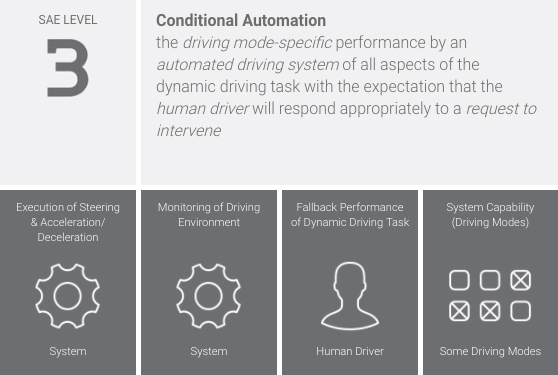
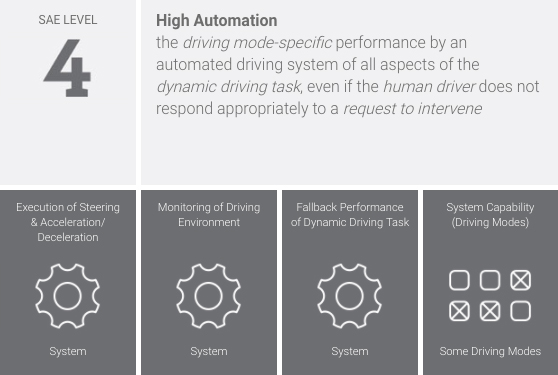
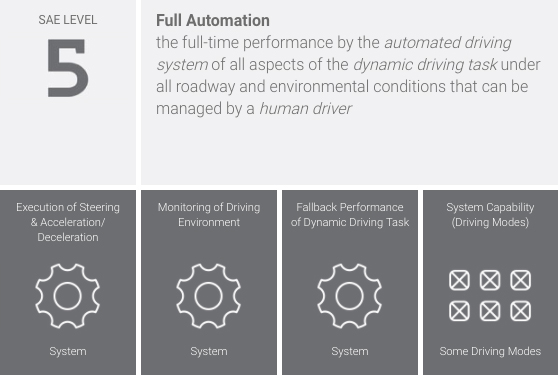
SAE International(SAEインターナショナル)のJ3016は、システムの一部または全ての運転モードで動作できるかどうか、および、3つのカテゴリーの運転タスク(操舵と加減速、走行環境の監視、システムが動的運転タスクを制御できない場合のフォールバック)を運転者もしくは車両のどちらが担うかに基づいて車両の自動運転レベルを分類しています。
SAEは、「自動化なし」のレベル0から、「完全自動化」のレベル5まで、自動化を5つのレベルで定義しています。

これらの「レベル」は自動運転技術にとり貴重なガイダンスであり、車両の自動化に関するグローバルな議論や規制に一貫性をもたらすという重要な役割を果たしています。しかし、SAEの分類法を用いる場合、以下の3点を考慮に入れる必要があります。
- SAEの分類では、能力と責任の変化にかかる複数の側面を1つの軸でとらえようとし、自動運転の発展をレベル0から5までに位置付けようとしています。実際には自動車メーカーやテクノロジー企業は、SAEのレベルの自動運転能力を独立した観点で開発しようとしています。
- SAEのレベル3の自動化では、自動化が運転環境の監視について責任を有し、不作動時にドライバーが十分にフォールバックできる時間的余裕を与えることとしていますが、これは、潜在的にはレベル4の、人間が全く責任を持たないレベルと同じくらい、実装は容易ではないといえます。
- さらに、交通事情、気象状況、工事やその他の要因等、運転環境の難しさという要素が、SAEではレベル4とレベル5を区別する際にのみ利用されています。しかし実際には、この複雑な要因は全てのレベルで勘案されるものです。
当社は、自動運転システム技術、ドライバーの能力、運転環境の難しさという3つの基本的な分野に研究を分けています。
当社の自動車両研究開発では、「ショーファー(自動運転)」と「ガーディアン(高度安全運転支援)」と名付けられた、2種類のモードに焦点を当てています。

ショーファーの能力は、ドライバーの一部または、全運転タスクを軽減し、主に、自動運転車が、運転操作をする度合いを示します。ショーファー能力が低い場合は、ドライバーが、運転環境を監視し、フォールバックを実行します(SAEのレベル2に類似した状態)。ショーファーの能力が向上すると、ドライバーは、フォールバックの実行にのみ責任を負います(SAEのレベル3に類似した状態)。さらにショーファーの能力が高度化すると、ドライバーによる関与なしに、車両だけで全ての運転操作を完全に処理することが可能です(SAEのレベル4および5に類似した状態)。

ガーディアンの能力は、人が運転している間、過失やドライバーのミスによる失敗、そして道路上のクルマ、障害物、他者による交通ルールの無視といった外的な要因などから、自動運転車が人を守る度合いを示します。ガーディアンの能力が高ければ高いほど、様々な形態の衝突から保護されることになります。例えば、レーンディパーチャーアラート、自動緊急ブレーキシステムなど現有の技術もガーディアンの技術に分類され、一部の衝突の回避を支援します。ガーディアンの能力が最も高まった場合には、ドライバーによる過失の有無にかかわらず、人が運転している車両は決して衝突することはないようにし、また他の車両やその他の原因によって発生する多くの衝突を避けるようクルマを動かすことが可能となると考えています。
ショーファー、ガーディアンは、自動化にあたっての異なる開発アプローチを示したものですが双方ともに、類似した認知、予測、計画技術に基づいています。実際、ショーファーに必要とされるハードウェアやソフトウェアは、ガーディアンにも利用されており、また、逆の場合もあります。
トヨタの自動運転車の研究は、単なる自動車の性能の研究より広範にわたり、ドライバーの能力と運転環境の難しさについても考慮しています。
重要な点ですが、ドライバーの能力や運転環境の複雑さは、一定ではなく、良くなったり悪くなったり、時と共に変化します。ドライバーの能力は、生まれつきの能力や疲労度合い、注意力の散漫度合いなどに依存し、また運転環境の難しさは、天候、交通や工事状況などによって変わります。ほとんどの場合、ドライバーの能力は、衝突を回避する程度で十分ですが、運転環境の難しさがドライバーの能力を超え、衝突が起こりそうになった際に、運転技術の問題が顕在化します。
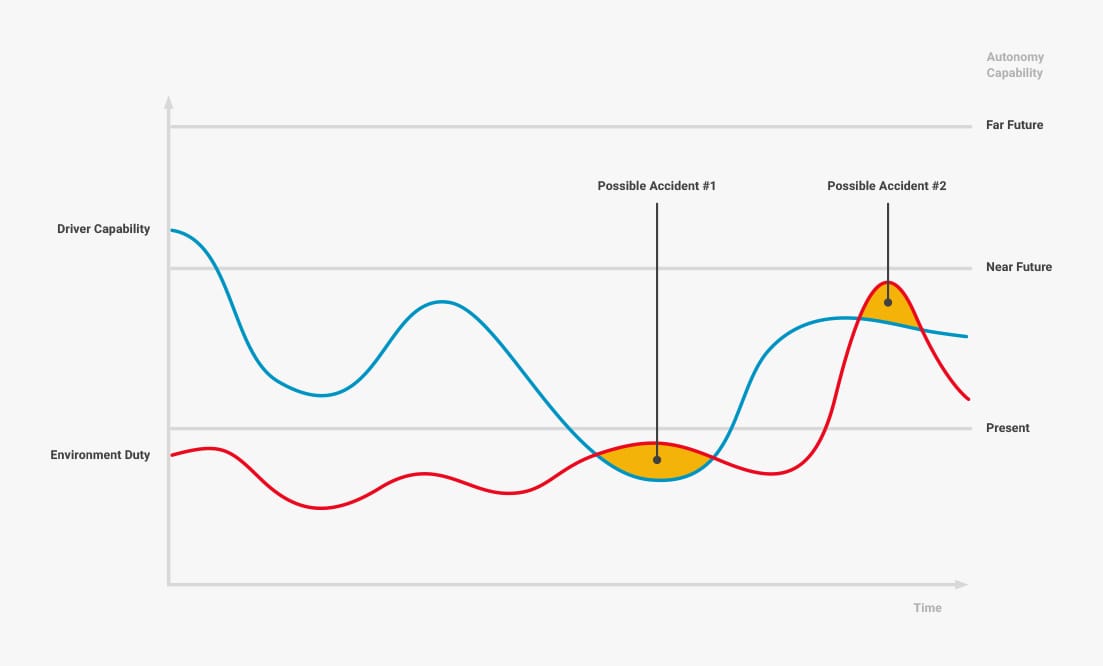
自動運転は、運転環境の難しさがドライバーの能力を超え、衝突を回避する必要になった場合、ガーディアンモードを起動させ、この状態を潜在的に解消するように機能します。さらに運転が難しくない状況では、ショーファーモードによる自動運転が作動できる状態になり、一定の条件下で運転者の負担を軽減します。
現在、ある一定の環境下においてのみ、ガーディアンモードが、ドライバーの能力よりも優れている場合があります。今後、ガーディアンの能力は、ドライバーの不注意などに関わらず、衝突を回避する車両の実現に向け、着実に改善されていきます。一方、ショーファー技術は、運転者による監視やフォールバックがなくても、あらゆる状況下で、安全な運転を可能にするという目標に向けて開発されていきます。
運転環境は、非常に複雑で困難になることもあるため、いかに高い性能を車両が備えていたとしても、事故を防ぐ完全な衝突回避のシステムは、存在しえないといえるでしょう。本質的な質問は、「どれだけ安全であれば、真の意味で安全といえるか」ということですが、その答えは、政府の規制、責任にかかるリスク、社会の寛容さ、そして何が技術的に可能かということにかかわってきます。一般的に、ショーファーの考え方に基づく自動化システムは、社会で許容される一般的なドライバーの能力よりも、安全である必要があります。一方、ガーディアンの考え方に基づくに関しては、たとえショーファーの考え方に基づく技術より低い技術水準でも、「害にはならない」として、社会的に受け容れられる可能性はあると考えられます。
