2004年03月16日




トヨタ、低速域での追従機能を有するレーダークルーズコントロールを新開発
― 0~30km/hで作動。渋滞走行時の運転を支援する画期的な機能 ―
トヨタ自動車(株)(以下、トヨタ)は、低速域での追従機能を有し、渋滞時の運転負荷を軽減する画期的な新システム「レーダークルーズコントロール(低速追従モード付)」を開発し、本年夏に発売予定の新型車に搭載する。
今回開発した低速追従モード付のレーダークルーズコントロールは、1997年8月にセルシオで採用して以来、展開してきた従来型のレーダークルーズコントロールに対し、0~30km/hでの低速追従機能を追加し、さらなる運転負荷軽減を可能としている。
本システムは、30km/h以下の速度領域で先行車に追従し、先行車が停止した時は、告知音と表示でドライバーのブレーキ操作を促すとともに、万が一、ブレーキ操作が遅れた場合は停止まで制御する。このように低速域から微低速域、さらには停止にいたるまで追従制御を行うことにより、渋滞時のドライバーのアクセル・ブレーキペダル操作負荷を大幅に低減することが可能となった。
本システムは、先行車を検出するレーザーセンサーの広角化と認識性能の向上、微低速域での滑らかな制動力制御を行う高機能ブレーキシステムの採用により、実現できた。
トヨタは、本システムを開発するにあたり、2001年に国土交通省の大臣認定を受けた試験車両を用い、渋滞が多発し、カーブの多い首都高速道路等での公道走行試験を実施してきた。
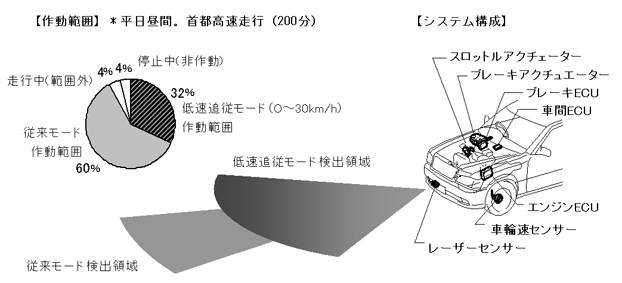
従来モードと併せて、平日昼間の首都高速道路を流れに乗って走行した場合、その所要時間の約9割を追従走行制御の対象にできると試算している。
なお、本システムを3月16日(火)に東京ドームシティ(文京区後楽)で行われる第3期ASV中間報告会にて展示する。
以上
ダウンロード
-
-

- 作動範囲/システム構成
-
