
2025年11月26日
Potaroを医療現場へ一日でも早く!~院内搬送ロボットのリーンな導入プロセスの実現を目指して~

トヨタ自動車が運営するトヨタ記念病院(愛知県豊田市)では、「笑顔とまごころあふれる病院」の実現を目指して、医療の質向上に取り組んでいます。その一助として、私たち未来創生センターはトヨタ記念病院と協力し、2023年5月の新病棟オープンに合わせて院内の物流オペレーションの改革に取り組むとともに、院内搬送ロボット「Potaro(ポタロ)」を開発し、24台を導入しました*1*2*3。
-未来創生センターが開発したPotaroとそれを活用した物流システムについて教えてください。
- 谷合
- Potaroを活用した物流システムは、トヨタ生産方式(TPS)の「必要なものを、必要な時に、必要なだけ運ぶ」という考え方がベースになっています。これを実現するために、トヨタ記念病院では24台のPotaroが、互いに連携しながら院内を効率的に動き回っています。Potaroは事前に取得した建物のマップ情報と、事前に登録されたウェイポイントと呼ばれる通過地点の座標にもとづいて、建物内を自律移動することができるロボットです。どの通路を通り、どこで停止し、エレベーターや自動ドアとどう連携するか、といった多数のルールに従って動くことで、これまで医療スタッフが行っていた搬送業務を代わりに実施しています。私たちはPotaroを活用したオペレーションの変革を通じて、医療スタッフの方々が、より多くの時間を医療スタッフにしかできないケアに専念できることを目指しています。
-Potaroを導入したトヨタ記念病院では、医療スタッフの働き方はどのように変化しているのでしょうか?
- 谷合
- 約2年間の運用を通じて、医療スタッフから「不安を抱える患者様のそばに寄り添って、ゆっくりお話を聞く時間ができた」といった、“患者様に寄り添う看護”への変化を実感する声などをいただくことができました。これは私たちにとって、何より嬉しい成果です。トヨタが掲げる「幸せの量産」というミッションに向けて、医療現場で最初の一歩を踏み出すことができたと感じています。
-よかったですね。日本の医療現場は、地域社会の高齢化や医療スタッフの働き方改革など、多くの課題に直面していると聞きます。トヨタ記念病院で実現した変化が、他の病院へもひろげられるとよいですね。
- 谷合
- ありがとうございます。一方で、トヨタ記念病院へのPotaroの導入に取り組む中で、このような院内搬送システムを世の中にひろげていくためには、まだまだ多くの課題が残っていることも痛感しました。
-トヨタ記念病院でのシステム導入にあたって、どのような課題に直面したのでしょうか?
- 谷合
- 非常に大きな課題だったのはPotaroの現場への「導入にかかる時間と手間」、つまり導入工数の問題です。先ほどお話しした24台のPotaroが連携して動くための複雑なルール設定ですが、トヨタ記念病院では、約4ヶ月という長い導入期間*4をかけて、システムのセットアップを行いました。しかし、今後多くの病院に展開していく上で、毎回これだけの工数を投入するわけにはいきません。また、設定作業にロボット開発エンジニアの専門知識や経験が必要な部分も多く、誰でも簡単に導入できる状態とはいえませんでした。この導入プロセスを、もっと「リーン」に、つまり無駄なく、誰でも、早く、簡単にできるように変革することが、私たちの喫緊の課題でした。
-なるほど。一つの病院で実現できたとしても、それをひろげていくためには乗り越えないといけないハードルがあるのですね。どのように課題にアプローチしているのでしょうか?
- 谷合
-
私たちは、この「リーンな導入プロセス」を実現するために、導入プロセスを「サービス仕様定義」「システム構築」「実機確認」などに細分化し、それぞれの工程で導入期間を短縮するための技術開発に取り組んできました。今回は「システム構築」について三例紹介します。
一つ目は「システム構築」工程で最初に行う、ロボットが走行するための「マップ作成」において、従来は私たちが専用ロボットを走らせ、時間をかけて院内の隅々まで計測していました。今回、新たに病院の建築図面から直接ロボット用のマップを自動生成する技術を開発しました。これにより、図面データさえあれば、現地に行かなくてもシミュレーション用のマップが素早く作れるようになりました。
-

- シミュレーション用マップの自動生成
- 谷合
- 二つ目は、「システム構築」工程を短縮するために、システムを統括するサーバーを、病院内に物理的な端末を設置するオンプレミス型から、あらかじめクラウド上に構築しておくことにより、環境構築の手間を大幅に削減しました。さらにクラウド環境の設定をコード化することで、開発時や障害発生時の再構築を素早く行えるようになりました。
-
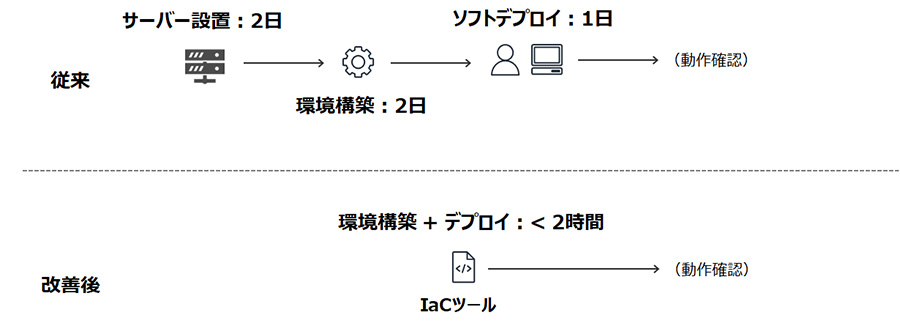
- サーバー構築工程の期間短縮
- 谷合
- 三つ目は「システム構築」工程において最も複雑な「ルール設定」の効率化ですが、こちらは開発を担当した上田さんから紹介してもらいます。
-最も複雑だったというルール設定について教えてもらえますか?
- 上田
- Potaroはたくさんの台数が同時に動くので、狭い通路でロボット同士が鉢合わせしないように、交通整理の仕組みが必要になります。具体的には、すれ違えない通路の手前で一度停止し、「通行権」を得てから進入するというルールで動いています。この「通行権」を取得するための待機場所(ウェイポイントの一つ)を地図上に設定する必要があるのですが、以前はこれを一つひとつ手作業で置いていたので、とても時間がかかっていました。そこで、廊下の幅を自動で読み取って「ここはすれ違いができないかも」という場所を特定し、待機場所を自動で配置するアルゴリズムを開発したんです。これで設定作業がぐっと楽になりました。
-具体的なアルゴリズムについて教えてもらえますか?
- 上田
- このアルゴリズムは、拡張ボロノイ図*5という空間分割の手法を応用したもので、ロボットがすれ違える距離の閾値(しきいち)を設定し、地図上にボロノイ線を引きます。線の数に応じて「対向可能路」と「交互通行路」に分類し、その境界に待機場所を配置することで、自動化を実現しました。
-
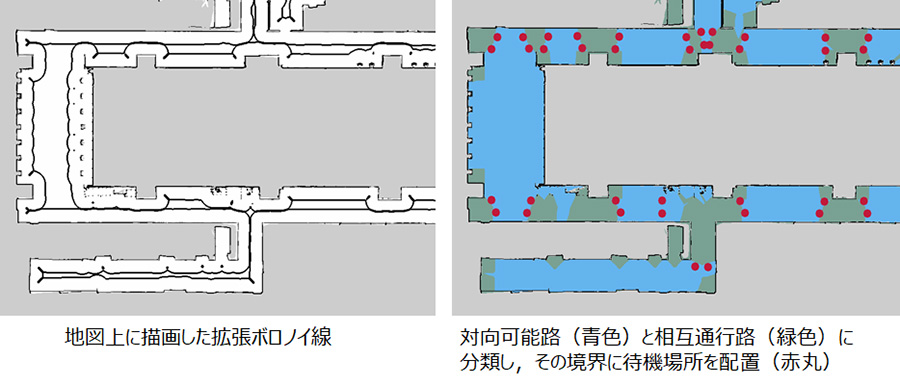
- 待機場所の自動配置アルゴリズム
-開発した導入プロセスの検証はどのように進めたのでしょうか?
- 上田
-
2025年3月、開院直前の知多半島総合医療センター(愛知県半田市)にご協力いただき、社外で初めての技術検証を行いました。トヨタ記念病院とは異なる環境で、導入の手間を減らすために開発してきたプロセスが他の病院でも通用するのかを確かめる、重要なステップでした。
まず、PC上で行うシナリオ設定などの準備作業は、開発した導入プロセスのおかげで目標の数日以内に終えることができました。しかし、いざ現地でロボットを動かすと、想定外の連続でした。特に一番苦労したのは、他社製の自動ドアやエレベーターとの連携です。実機でうまく動かず、デモンストレーション直前まで現地で修正作業に追われました。
この現場での経験を通じて、開発した導入プロセスの有効性と、現場でしか分からない課題の両方が見えてきました。リーンな導入プロセスの実現に向けた確かな一歩になったと感じています。
-

- 技術検証のようす
-世の中にひろげていくために、また一歩前進ですね!知多半島総合医療センターの方々からは、どういった反応をいただいたのですか?
- 谷合
- Potaroが無事に院内を走行できるようになったあと、病院関係者の方々へ搬送サービスのデモンストレーションを行いました。参加された方々からは、Potaroの「置き配機能」や「積載量の多さ」を高く評価してもらいました。その一方で、「人を避ける際の動作が少し不安定」といった課題もご指摘いただき、乗り越えないといけない新たなハードルも見つかりました。医療の現場でロボットが活躍する未来へ、期待の声もいただきました。このように、現場の期待と課題、その両方の生の声に触れられたことが何よりの収穫です。実験にご協力くださった知多半島総合医療センターの皆様には本当に感謝しています。皆様の期待に応えられるよう、今後もチャレンジを続けていきます。
-導入プロセスについては、今後どのように進化していくのでしょうか?
- 上田
- 例えば、ウェイポイントの自動配置アルゴリズムも、交差点などでウェイポイントが密集してしまい、手作業での修正が必要になるなど、まだまだ完璧ではありません。こうした点を一つひとつ解消していき、更なる導入工数の低減を目指していきたいです。
-ありがとうございました。トヨタの未来創生センターの取り組みが、より多くの人々に幸せをもたらすことを期待しています。
- 谷合
-
ありがとうございます。私たち未来創生センターが目指しているのは、単に便利なロボットを作ることではありません。Potaroの導入を通じて、医療スタッフの皆様が、医療スタッフにしかできない、より専門的で温かみのあるケアに集中できる環境を創り出すことです。その先には、患者様一人ひとりの「幸せ」があります。この「医療に集中できる職場環境づくり」というビジョンを、まずは日本中、そして世界中の医療現場にひろげていきたいです。
この挑戦は、私たちだけでは成し遂げられないので、今後も社外の研究者や医療機関、企業とも協力し、医療現場に一日でも早く貢献できるよう、研究を加速させていきます。
著者

谷合 理(たにあい おさむ)
未来創生センター R-フロンティア部 ロボティクスソリューションズグループ

上田 佳輝(うえだ よしき)
未来創生センター R-フロンティア部 ロボティクスソリューションズグループ
参考資料
| *1 | トヨタの未来創生センターが創る――「医療施設向け自律移動搬送ロボット」「デジタルツインによる工事現場の作業工程の最適化ツール」を徹底解説 |
|---|---|
| *2 | ロボットが人の代わりに薬を運搬!~200台超の天井カメラで病院ロボットをサポート~ |
| *3 | 医療現場にもトヨタ流カイゼン!トヨタ記念病院 新病棟オープン |
| *4 | システムを現場に導入し、稼働するまでのセットアップに必要な期間 |
| *5 | 平面上の距離に応じて領域を分割する手法の一つ
|
本件に関するお問い合わせ先
- 未来創生センター
- メールアドレスfrc_pr@mail.toyota.co.jp
関連コンテンツ
アクセスランキング




