
2024年02月15日
ロボットが人の代わりに薬を運搬!~200台超の天井カメラで病院ロボットをサポート~

トヨタ自動車未来創生センターでは、看護師の負担軽減のため、人に代わって薬剤を搬送するロボット(Potaro)の開発に取り組んでいます*1。Potaroは今でこそ薬剤を積んで院内を一日百数十回行き来していますが、開発時は狭い廊下では大きなものとすれ違えず動けなくなるトラブルもありました。そこで、事前に天井カメラで狭い廊下付近の状況を確認することで、Potaroのスムーズな搬送をサポートするシステムを構築しました。その内容について、開発メンバーの吉川にヒアリングしました。
-

- 図1 トヨタ記念病院
病院の仕事の改善を目指したロボットシステム
-今日はよろしくお願いします。今回は自動車ではなく、病院ロボットの開発なのですね。
- 吉川
- はい。トヨタ自動車は、クルマ会社からモビリティカンパニーに変わりました。モビリティ開発においても技術でお役に立ちたいと思っているんです。ロボットも実はマニピュレーションやセンシングなどの機能を持ったモビリティなんです。未来創生センターではこれらロボットの要素技術の研究を行う一方で、技術を実際に使えるシステムに落とし込む開発も行っています。今回は、天井カメラの画像認識を用いた病院ロボット搬送システムについてご紹介しますね。
-クルマ以外にも手を広げているんですね。でも、どうして病院なんですか?
- 吉川
- いろいろな現場での困りごとを調査しているときに、トヨタ記念病院で看護師の業務負担が大きいという声がありました。さっそくトヨタ記念病院で調査をさせてもらったところ、実は、看護師が実際に患者さまと接している時間は少ないことがわかったんです。業務の中で、カルテ記入や患者さまの情報取得、ほか職種との連携などあるなか、実は、モノを運ぶ時間が多く占めているのもわかりました。運搬ならお役に立てると判断し、ロボットで薬剤や医療機器を運ぶことで看護師の負担を減らすことにしたんです。
-

- 図2 薬局を出るPotaro。薬剤の入ったワゴンを背負っている
-病院へのロボット導入に課題はありましたか?
- 吉川
- はじめは非常に苦労しました。試験的に導入したロボットが通行の邪魔になったり、搬送に来たロボットに気づいてもらえなかったり……。でも、病院スタッフの皆さんとお互いに根気強くコミュニケーションを取って、だんだん歩み寄っていきました。ここまで深く入り込んで一緒に開発ができたのは、トヨタの仲間だったからというのが大きいと感じていて、感謝しきりです。
-看護師や病院スタッフの意見を取り入れて開発をしてきたのですね。ロボットシステムの開発自体にも苦労はありましたか?
- 吉川
- たくさんありましたよ!モノを多く早く運ぶ、人にぶつからない、搭載物にいたずらされない……いろいろなことを考慮して開発する必要がありました。すべて語ると長いので、私の関わったひとつを紹介します。ロボットが狭い廊下で大きなものとすれ違えずに止まってしまうという問題です。
建物はロボットのために大きく設計されているわけではない。ベッドの通行の邪魔をせず廊下に入るタイミングを測る
-すれ違えない、というのは?
- 吉川
- 病院内はいろいろなものが移動しています。患者さまを運ぶベッドや、入院病棟のごはんを運ぶ台車とすれ違うには、一部の廊下やドアは幅が足りないのです。ロボットとベッドが余裕をもってすれ違おうとすると約2.3mの幅が必要になり、他の用途にもスペースが必要な入院病棟ではすべての廊下でそれを実現する事は不可能でした。
-

- 図3 通行中のロボットに邪魔されてベッド搬送ができない様子。図中の廊下の幅は約2.1mだが、すれ違いは困難
ロボットの近接センサーでは、ドアの向こうから来る物体をあらかじめ検知して道を譲ることはできません。しかし、薬剤を何分以内に運ぶという時間制約があるため、時には30m以上ある廊下を引き返すのは望ましくありませんし、それを許すと、複数台のロボットのルートを制御するソフトの構成が複雑になってしまいます。そこで、ロボットルート上の天井にカメラを取り付けて、ロボットが狭い廊下に入る前に、入ってもいい状況なのかを確認することにしました。各カメラはサーバー室の画像処理サーバーと接続します。画像処理サーバーはカメラ画像の解析結果をもとに廊下への進入や待機を判断し、ロボットは廊下に入る前にそれを問い合わせる、という流れです。
-
- 図3 通行中のロボットに邪魔されてベッド搬送ができない様子。図中の廊下の幅は約2.1mだが、すれ違いは困難
-天井カメラとサーバーを組み合わせたシステムなんですね。このシステム開発の難しさはどこにありますか?
- 吉川
- 主に2つの難しさがあります。「大きな障害物」を確実に見つける技術と、200台以上のカメラ画像を現実的な値段のサーバーで処理できることです。
入ってはいけない瞬間を確実に判別する技術とは
-1つ目の『「大きな障害物」を確実に見つける技術』とはどういうことですか?
- 吉川
- お客様……今回の場合はトヨタ記念病院ですが、自分たち以外の方にシステムを渡すときには以下を考慮します。
- ほぼ100%の成功率
- 連続稼働可能な負荷と処理速度
- 汎化性は不要
-

- 図4 通路の占有検知ソフトの試作結果。
カメラ画像(左)と検知結果(右、薄い青色部分が占有部分)
-

- 図5 実際のカメラ画像(左)と試作したシミュレーションモデル(右)
でも、特定の物体以外には道を譲らなくてもいいというルールや、一部のシミュレーションモデルを試作したときの時間やコストなどを考慮すると、最適なものは別にありました。単純な物体認識*2です。もっと最先端の難しい技術じゃないの?と拍子抜けかもしれませんが、だいぶ昔からある分、軽くて、精度が良くて、比較的簡単にどの環境にでも適用させられるほど熟した技術だというメリットがあるんです。今回も、病院固有の台車やベッドの学習データを独自に収集して、短期間で環境に適用させることができました。加えて、認識結果の一部分の、数秒前と最新の画像の差分を見ることで、低負荷かつ高速に「動いている大きな障害物」を見つけることができるのです。
-

- 図6 廊下に入ろうとする病院固有の物体(台車、ベッド)の認識結果。左は開院前の養生された建物で、新しい台車のデータ取得をした際のもの
病院中をカバーする242台のカメラの運用を、1台のGPUサーバーで
-2つ目の難しさの、『200台以上のカメラ画像を現実的な値段のサーバーで処理できること』というのは?
- 吉川
- 建物中の搬送ルートをカバーするため、カメラは242台も必要でした。ですが、予算やサーバー室の電力を考えると、画像処理サーバーはあまり高スペックにできなかったんです。今回用いたサーバーは、GPU2枚、電力1500Wという、一般的なサーバーです。そこで、まず認識を同時に走らせる必要があるカメラの最大数は60台であることを搬送頻度や行き先から導き出し、これを稼働させることを目標にしました。画像処理サーバーはロボット管理サーバー経由でロボットの現在位置と行き先をリアルタイムに確認して、狭い廊下に近づいたときだけ、その付近のカメラ画像を解析するという流れです。また、流動的なカメラ選択と画像認識を効率よく行うためにプロセス間通信に共有メモリとデータベースを使い分けたり、有線の通信許容量を超えない画像の重さや医療機器の通信を邪魔しないネットワーク構成について各部署と相談したりと、工夫を重ねました。結果として、画像の通信量と処理枚数を大幅に抑え、9フロアをカバーするカメラシステムが完成し、今ではPotaroがスムーズに通行できるよう稼働しています。
-
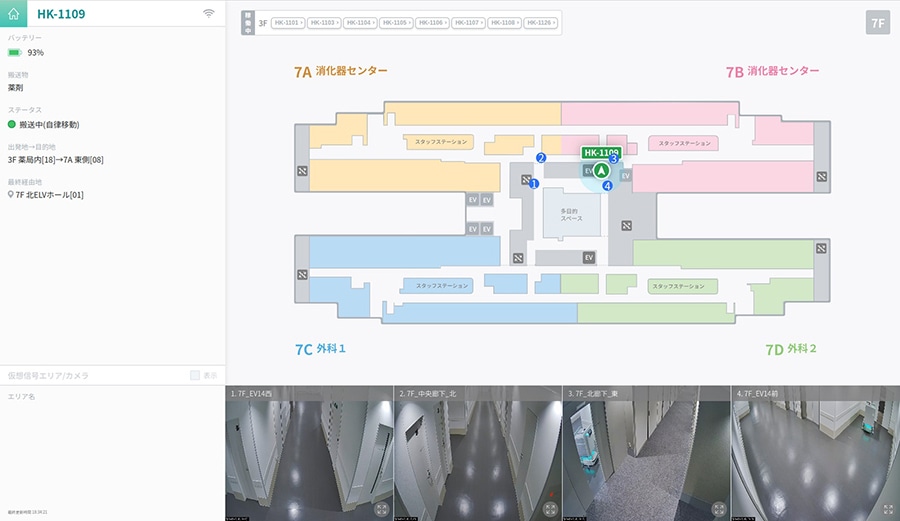
- 図7 ロボット付近のカメラと連携する監視画面
-これらすべてを解決してシステムが動くんですね。成果はいかがですか?
- 吉川
- 一日に数回は、想定通りに「大きなもの」を検出して道を譲ることができています。しかし、実際に稼働すると、Potaroの方が先に移動してほしいケースもあり、状況の精査が今後の課題になっています。
これまでの振り返りと今後の意気込み
- 吉川
- さまざまな方の協力を得て、一日平均170回の搬送を担うロボットシステムと、200台以上のカメラ、エレベーター、ドアなどのインフラと連携して24台(搬送量の見直しにより当初計画25台*3を24台に変更)ものPotaroが動き回っている環境が出来上がりました。これは今の機能だけでなく、新技術・新機能の研究開発にも十分な可能性のある環境だといえるでしょう。これからもさまざまな分野でトヨタの技術を役立てていくために、お客様といっしょにいろいろなことに挑戦することが大事だと思っています。未来創生センターは研究にも開発にも意欲的なところです。国内外の仲間たちと連携して、技術で解決できることはどんどん解決していきたいと思います。
-

- 図8 ハロウィン仕様に飾り付けられたロボットと開発メンバー。筆者は茶色の服を着用
- 動画1 Potaroの稼働風景
著者
吉川 恵(よしかわ けい)
未来創生センター R-フロンティア部 ロボティクスソリューションズグループ
本件に関するお問い合わせ先
- 未来創生センター
- メールアドレスfrc_pr@mail.toyota.co.jp




