
2026年03月05日
人と院内搬送ロボットPotaroの共存~ロボットの移動を支える認識技術~

トヨタ自動車未来創生センターは、将来のモビリティ社会を実現するために、人とロボットが共存する社会を目指し、さまざまな課題の解決に取り組んでいます。その一環として、医療現場における看護師や医療スタッフの負担軽減とサービス向上を目指し、院内搬送ロボット「Potaro(ポタロ)」を開発し、2023年5月よりトヨタ自動車が運営するトヨタ記念病院(愛知県豊田市)において24台のPotaroによる薬や検体などの搬送サービスを導入しています*1-4。
-まずは、Potaroの実績を教えてください。
- 坂本
- トヨタ記念病院では、24台のPotaroが稼働しています。Potaroはスタッフエリアから各病棟まで、医療機器や薬剤などを自律的に搬送しています。2023年の導入以来、搬送成功率は99%、累計走行距離は27,000km(2026年1月時点)に達しています。これほど多くのサービスロボットが、一般の方も利用される施設で長期間にわたり運用されている事例は、世界的にも珍しいのではないかと思います。
-

- 図1 薬剤室で搬送準備をするPotaro
-順調に運用されているようですが、現場で見えてきた課題は何でしょうか?
- 坂本
Potaroの搬送エリア拡大を目指して多くの患者さまがいる場所で試走を行ったときに、Potaroが人の移動を邪魔してしまうという問題が生じました。これまでのPotaroによる搬送はスタッフエリアを中心に実施されており、スタッフはPotaroの動きを知っているために大きな問題になりませんでしたが、患者さまはPotaroの動きを知らないため、お互いがスムーズに移動できないケースが目立ちました。
その原因として、以前のPotaroの自律移動ソフトは、Potaroが経路上に人や障害物を検知すると減速停止し、一定時間停止が続くと経路を再計算する制御を行っていました。これはスタッフが能動的に回避行動をとることを期待した設計思想に基づくものです。安全性に優れていますが、動いている人が多い環境では長時間停止したり経路の再計算を繰り返したり、非効率な挙動になりがちという問題があります。
-その課題に対して、どのようなアプローチを取られましたか?
- 坂本
- 人に配慮した自律移動を実現するためには、まずPotaroが人を正確に認識し、その動きを把握することが不可欠です。当時稼働していたPotaroは、人と物の区別ができていなかったため、まずは人の認識機能の開発から着手しました。最初のステップとして、RGB-DセンサやLiDARなどの複数のセンサや認識アルゴリズムを机上で検討しました。人の認識機能には、人検出や速度推定など複数の要素が必要であり、それぞれに対してセンサやアルゴリズムの選択肢が存在します。どの方式が最適かを見極めるため、未来創生センターの実験室内で自分や開発メンバーを対象に計測を重ねました。その結果、2D LiDARと魚眼カメラを組み合わせた人位置・速度推定機能が、認識範囲や精度、Potaroへの搭載制約の面で有力であることが分かりました。また、この検討段階からプランナ(軌道計画および制御)の開発者と連携し、処理周期や位置・速度推定精度など必要な要件を確認しながら実装を進めました。
-認識機能が追加されたことで、ロボットの動きはどのように変わりましたか?
- 坂本
- 改善前後の変化を確認するために、実験室で人がPotaroの前を横切ったりPotaroの横をすれ違ったりする状況を再現し、Potaroと人の接近距離や軌道の最適性を確認しました。改善前の手法では横切る人に対しては直前で急停止し、すれ違う人に対しては経路変更が遅れていました。改善後の手法では横切る人に対しては衝突を予期し減速して人に道を譲り、すれ違う人に対しては約6m前から経路を変更し衝突を避けるような動作が確認できました。この回避動作のスムーズさはペイロード(最大積載量)が大きい院内搬送ロボットにおいてユニークな動作だと手ごたえを感じています。
-
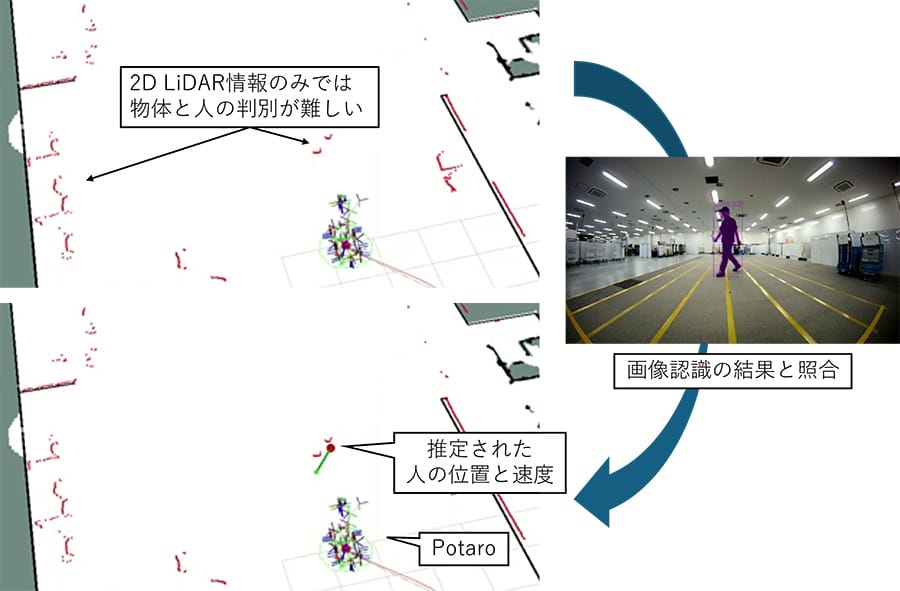
- 図2 2D LiDARと魚眼カメラを組み合わせた人位置・速度推定機能
- 動画1 横切り・すれ違いのようす
-新しい手法は病院でトライされましたか?
- 坂本
- はい。トヨタ記念病院の患者さまが多くいる場所で再度試走を行いました。横切りやすれ違いのケースではPotaroがスタックを起こさずに人を回避していくようすが確認できました。一方で、Potaroの側方や後方の人をスムーズに回避できない場面が目立ちました。このように、現場での試走を通じて実験室内だけでは見えてこなかった課題や改善点が実感をもって明らかになりました。開発したシステムをすぐに現場で試せることはシステム評価において重要であり、現場との距離が近い院内搬送プロジェクトの強みだと考えています。
-実験室や現場でのトライから、さらに発展した取り組みもしましたか?
- 坂本
はい。試走を重ねる中で、側方や後方にいる人まで移動を予測できることの必要性が明らかになりました。より発展的な対策として、Potaroに複数のカメラを搭載して、全方位の人を認識する機能の開発を進めています。この開発は、クルマの自動運転技術に強みをもつToyota Motor Europe(ベルギー)のAI-CORE Teamと連携し、さらにハードウェアのブラッシュアップも並行して実施しました。
しかし、連携においていくつかの課題もありました。まず、連携先が海外にあるため、実機の共有が難しい点があげられます。また、Potaroは搬送物を入れるワゴンを搭載しているため、カメラの配置に制約が生じ、既存センサとの重複も避ける必要がありました。そのため、Potaro全体のセンサ配置を見直す必要がありました。
これらの課題に対しては、シミュレーション技術を活用したバーチャル環境で検証を行うことで対応しました。議論の結果をいち早く検証するため、プロジェクトのハードウェア開発者とすり合わせを行い、新たな試作機の製作も行いました。
-
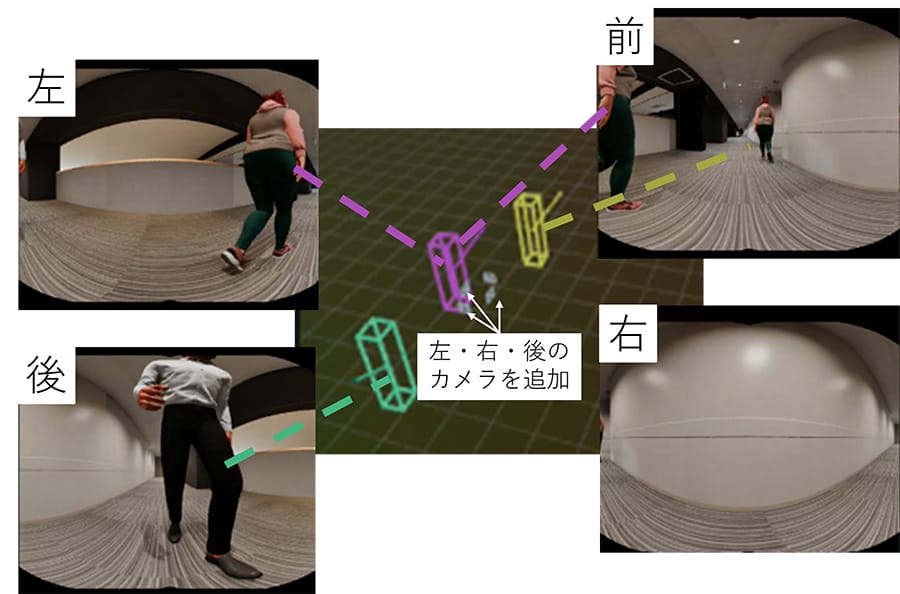
- 図3 複数カメラによる全方位の人認識(シミュレーションを用いた検証)
-今後の展望について教えてください。
- 坂本
- “Potaro-人”間や“人-人”間の相互作用を考慮したより高精度な移動予測の実現に取り組んでいます。移動予測の研究は、人の位置や速度の履歴から将来の軌道を推定する手法が主流ですが、周囲の物体情報や視覚言語モデルによるシーン理解を活用することで、より高性能な移動予測が実現できると考えています。さらに、高齢者の方や車いすで移動されている方を認識し、十分な余裕をもって回避行動をとるなど安心感のある制御を目指しています。また、院内搬送ロボットに求められる認識技術は当然ながら人の認識だけではありません。要求される認識機能を最小限の構成で実現するためのアルゴリズムやセンサ構成の検討が必要です。現場での継続的な実験を経て、ソフトウェアとハードウェアのアップデートを続けていきます。
-最後に、未来創生センターの特長や魅力について教えてください。
- 坂本
- 未来創生センターは、先端研究から社会実装まで、技術でチャレンジできる環境が整っています。国内外の研究者や技術者と連携し、切磋琢磨しながら新しい技術を作り上げることができるのも大きな魅力です。このような環境で、私たちは日々技術を磨き上げながら、さまざまな課題にチャレンジしていきたいと考えています。
著者

未来創生センター R-フロンティア部
ロボティクスソリューションズグループ
本件に関するお問い合わせ先
- 未来創生センター
- メールアドレスfrc_pr@mail.toyota.co.jp




