Jun. 13, 2023
On the Study of Human-Centered Physical Assistance, in Which Robots Adjust to People
The Frontier Research Center of Toyota Motor Corporation (Toyota) and Toyota Technological Institute are jointly working on basic research on assisted control technology for the health mind and body through coordinated work between humans and robots. This time, we asked the members who are studying robot-assisted physical abilities, Masashi Yamashita, Yuhei Yamaguchi, and Hitoshi Yamada about their research.
- To begin with, why are we conducting research on robots to assist people's physical abilities?
- Yamada
- As people age, their physical abilities, such as that of their muscles, decline. It is important to maintain as much physical ability as possible for walking and working in order to be active as long as possible. In an aging society, we believe that robotic assistance in physical abilities will become important in the future to meet various needs. In such fields, research has already been carried out on types of robots worn by humans (wearable robots) and types of robots like arms (manipulator-type robots).
- A future with greater mobility achieved by robots that assist human physical abilities certainly seems worthwhile. What are the challenges to making this a reality?
- Yamada
- For example, wearable robots should move according to the person's intention without interfering with their movement. However, there were challenges in with the robot incorrectly estimating a person's intention to move and applying an inappropriate force to the person's movement, and if the person pushed against the force of the robot, it would result in strong discomfort as it was very difficult to move. There were also challenges in how to ensure human safety against unexpected robotic movements. Therefore, in our research, we proposed three basic technologies for solving these fundamental problems: [1] the ability to detect a person's intention to move; [2] the ability to provide a person with appropriate force in the appropriate timing to the person's movement; and [3] the ability to limit the force and speed exerted by the robot. We were happy with the performance of wearable and manipulator-type robots.
- Now, please tell us [1] about the ability to identify people's movement intentions. How does the robot know how the person wearing it wants to move?
- Yamaguchi
- Let me use wearable robot as an example. As a method for estimating the intention of a person's movement, wearable robots make a mathematical model of how they move, and sometimes use a method for estimating the external force (disturbance observer) that differs between the motion calculated by the mathematical model and the actual motion because the obstacle around the person exerts force on them. We initially attempted to estimate human movement intentions using a disturbance observer, but we were unable to successfully operate wearable robots in this way due to the difficulty of creating appropriate mathematical models and low estimation accuracy.
- How did you solve this problem?
- Yamaguchi
- The estimation accuracy was improved by considering that human motion intentions can be estimated from the actions before and after, and using a reservoir network suitable for time series learning of errors together with a disturbance observer*1. We were able to correctly estimate the human motion intention from the robot's state by allowing the reservoir network to learn in advance what kind of commands would move it when the robot was worn by a person (Figure 1).
-
-
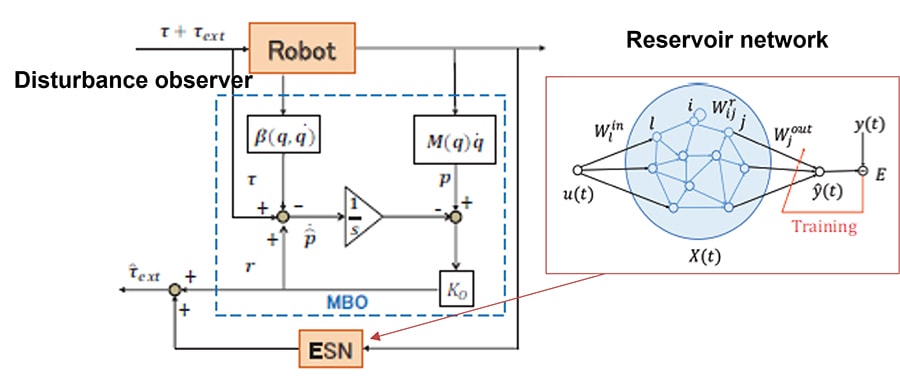
- Figure 1. Configuration of Intent Estimation Section
-
-
-
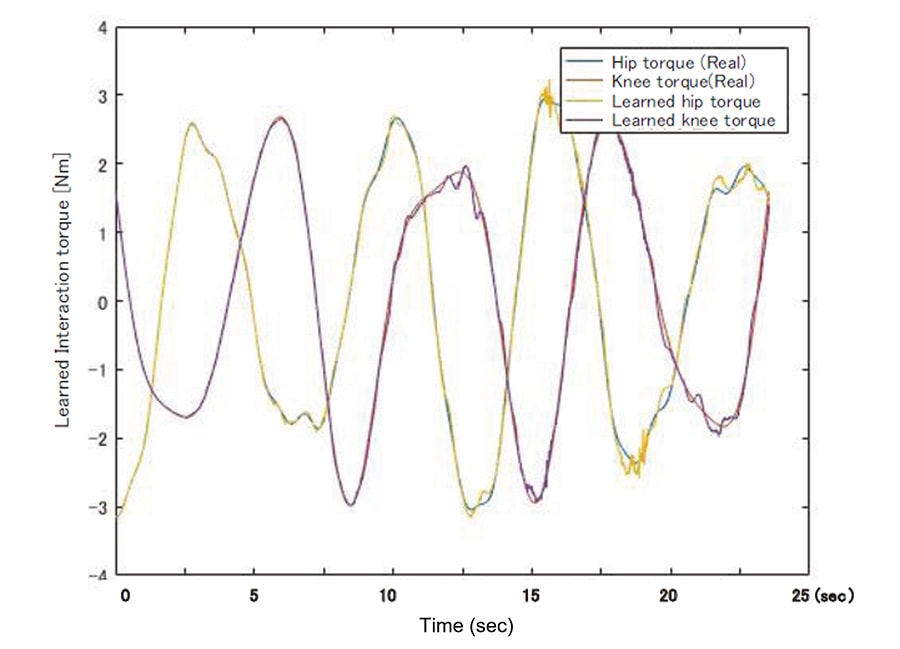
- Figure 2. Experimental Results (Performance for Estimation of Interference Force)
-
Reservoir network for the disturbance observer at the action intention estimation unit. The estimation error of the interfering force is reduced by combining ESN (Echo State Network). Figure 2 compares actual (Real) and estimated (Learned) hip torque (Hip torque) and knee torque (Knee Torque), and the agreement between the two can be confirmed (actual hip torque: blue, leaned hip torque: yellow, actual knee torque: light purple, and learned hip torque: purple).
- I see. You've compensated for the difficult part to model by having AI learn. Next, I would like to ask you [2] about the ability to give people the right strength according to their movements.
- Yamashita
- Imagine, for example, that you are wearing a wearable robot and trying to lift a 10kg object. If you exert a 4kg force, the robot will assist you with the remaining 6kg force. This type of control is called Assist As Needed control (AAN control), which can assist you only when you need it. We expect that when wearable robots are used by older adults, this AAN control will not only enable tasks that cannot be achieved by the user's power alone but will also have the effect of bringing out the user's residual ability.
-
-
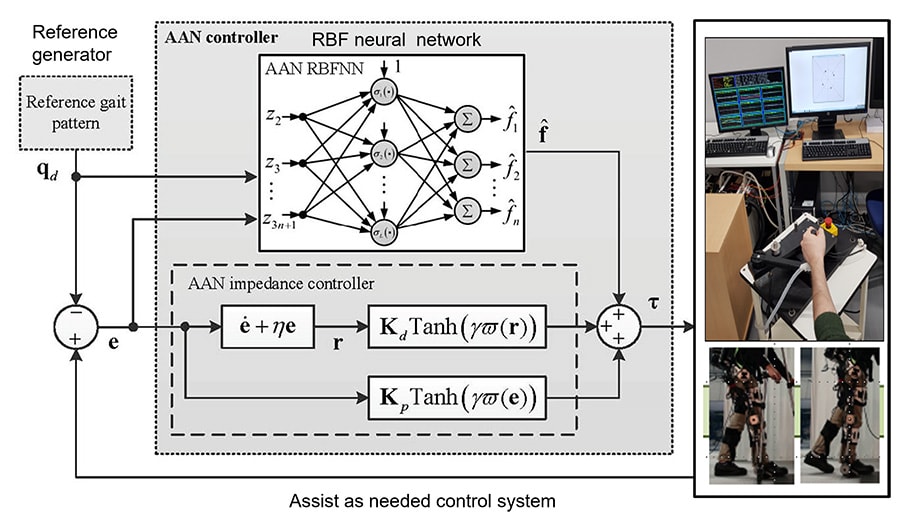
- Figure 3. General configuration of control system
-
-
-
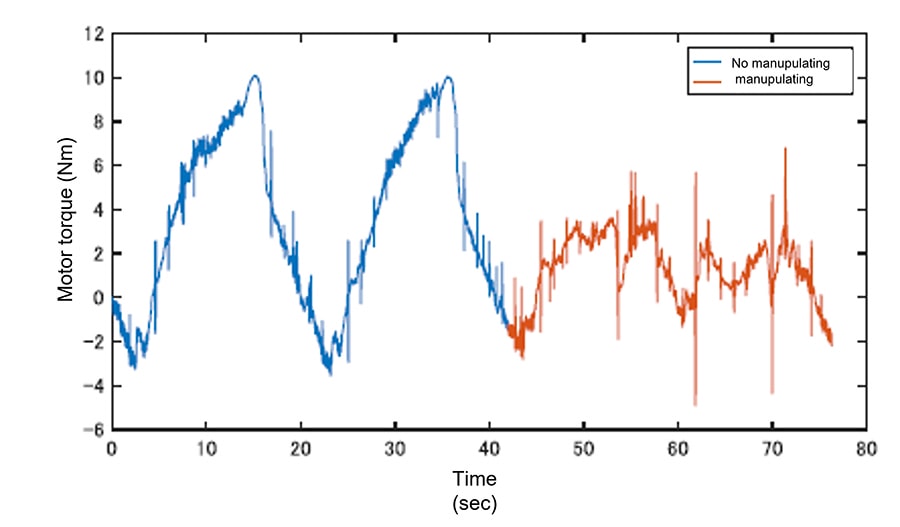
- Figure 4. Experimental results (AAN performance)
-
Radial Basis Function (RBF) The neural network-based adaptive feedforward and nonlinear feedback with dead zone function uniquely constitute the assisted control system (Figure 3). The robot assist is high when wearable robot wearer is weak, and robot assist is low when wearer is operating (Figure 4). Feedforward adapting to human characteristics is more important.
- So far, I understand how the robot [1] captures a person's movement intention and [2] produces the appropriate force to match the person's movement. Finally, [3] What abilities limit the force and speed exerted by the robot? It certainly seems important for people with wearable robots and people around them not to perform the robot's unanticipated movements.
- Yamashita
- Yes, exactly. Robots that move quickly or exert a great deal of force quickly cannot be used reassuringly. Therefore, we created the instructions to the robot in three steps: In the first step, the basic movement of the robot (moving the tips of the hands and feet) should be performed at a certain rate. In the second step, the amount of change in speed is adjusted so that the change in speed is not abrupt. This makes it a softly manipulated with no movements such as a sudden movement or stop. Moreover, by limiting the forces generated by the robot, we believe that it will become safe and reassuring for both wearable robot wearers and for those around us*2*3*4.
-
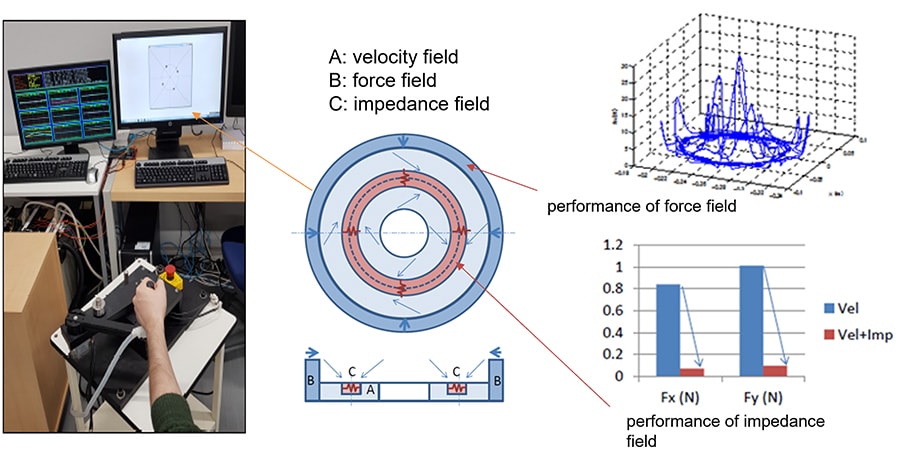
- Figure 5. Experimental results (force field and impedance field performance).
The target value of the robot is based on the field theory, and it is generated sequentially in the field composed of three layers: velocity field (A, basic performance), force field (B, safety), and impedance field (C, flexibility). It was applied to wearable robot and manipulator type robot, and it was confirmed that the desired performance was obtained. Figure 5 shows an example of a manipulator-type robot with handy operation. Especially by applying an impedance field to the velocity field, a soft assist from a slight force is realized (Figure 5, lower right). In addition, by applying a force field to the outer periphery and adding constraints on the movable range, the security safety was enhanced (Figure 5, upper right).
- It is important to understand what people want to do while ensuring safety, and to assist people only where they require it.
- Yamada
- Yes, that's right. It is important to have the robot understand the person correctly when trying to create a robot that moves to the person's will. In order to make it easier for robots to adjust to people, rather than for people to adjust to a robot, I feel that it will be necessary to understand the characteristics of thousands of diverse people and to study the mechanisms and control methods of robots that adapt to those characteristics. We have introduced the assistive technology for physical abilities. Toyota and Toyota Technological Institute are also conducting research on the assistive technology of mind (assistance to raise one's mood), so we would like to introduce this technology on the next occasion.
- We will look forward to future research. Thank you for the very interesting discussion today.
-
- From left, Yamaguchi, Yamashita and Yamada. Three people interested in the brain, robots, and control are gathering for research.
References
| *1 | Seiyoshi, H.J. Asl, Katsushi Yamashi, Ohira Yamaguchi, Hirai Yamada, "Assist-as-Needed control to permeability control" and the 10th Multi-Symposium of the Control Division of the Metric Automated Control Society, 3M7-3, 2023. |
|---|---|
| *2 | H.J. Asl, M. Yamashita, T. Narikiyo, M. Kawanishi, "Field-Based Assist-as-Needed Control Schemes for Rehabilitation Robots", IEEE/ASME Transactions on Mechatronics, Vol.25, Iss.4, pp. 2100-2111, 2020. |
| *3 | H.J. Asl, K. Katagiri, T. Narikiyo, M. Yamashita, M. Kawanishi, "Augmenting human power by assistive robots: Application of adaptive neural networks", Elsevier Control Engineering Practice, Vol.110, 2021. |
| *4 | H.J. Asl, K. Katagiri, T. Narikiyo, M. Yamashita, M. Kawanishi, "Satisfying Task Completion and Assist-as-Needed Performance in Robotic Exoskeletons", IEEE Transactions on Medical Robotics and Bionics, Vol.3, Iss.3, pp. 791-800, 2021. |
Contact Information (about this article)
- Frontier Research Center
- xr-probot@mail.toyota.co.jp
RELATED CONTENT
MOST POPULAR