Jan. 19, 2023
Researching "Human-Friendly Robot Arms" with the Goal of Having Robots Help with HouseworkThe hopes behind the research of a young researcher and the leader
At its Toyota Frontier Research Center, Toyota Motor Corporation (hereafter, "Toyota") is researching robots that will help humans by living with them at home and doing the same work they do. Recently, we are seeing collaborative robots that can be used alongside humans inside plants. These industrial robots have their arm positions and posture control, but Toyota's human-partner robot arm controls the forces applied to the arm and the fingers in tasks that involve a lot of contact with the surrounding environment, allowing it to exist in harmony with human. Some of Toyota Frontier Research Center's research results have been presented1 at the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022), held in October 2022. Today, we talked with Yoshihiro Okumatsu, Manipulator Research Team Leader, and Manabu Nishiura, one of the team members, about the overview and objectives of the research, as well as their presentation at IROS 2022.
-

- Interview with the researchers (from the left): Yoshihiro Okumatsu (Manipulator Research Team Leader), Manabu Nishiura (Manipulator Research Team Member)
- Toyota is conducting R&D on a number of robots. Can you tell us why you started to research this human-partner robot arm?
- Okumatsu
- Starting with the Human Support Robot (HSR), Toyota has researched and developed robots designed to exist in harmony with human. However, there are a large number of problems that need to be solved, including getting robots to provide services to a range of humans in the home, or how to make them adapt to the constantly changing environment in the home. In particular, household robots move very slowly due to the need to consider safety, and there are those who say they are unable to wait until robots have finished their tasks. So this project got its start from the idea of fundamentally revising robots, from their hardware configurations, to create robot arms that could operate at the same speed as humans while contacting the surrounding environment in the same way and same spaces as humans. As an aside, to me one of the appeals of the Toyota Frontier Research Center is being able to tackle new, and major, challenges for questions that researchers have themselves.
- A large number of research institutions, such as universities and corporations, are conducting robotics research. Could you tell us the features of Toyota's robotics research and development?
- Okumatsu
- Toyota's robotics research and development is noted for pursuing both the hardware and software aspects. The people in charge of hardware and software do their research as close as possible to each other to create a synergistic effect. Generally, hardware development takes longer compared to software development, but at Toyota, we can make simple hardware prototypes and try them out using prototype software, to get feedback for our software and hardware specifications. Of course, we also do simulations ahead of time and consider the appropriate parameters. By repeating this cycle at a rapid pace, we can maximize the synergy between hardware and software and accelerate our own research speed.
- Nishiura
- I like being able to make progress while debating with specialists in both hardware and software. I'm working on researching control software for manipulators, or robot arms, but if there's a hardware issue, or a request to change the hardware for reasons of control, then I can talk to the person in charge of the hardware and get improvements right away.
- Could you tell us about your presentation at IROS 2022?
- Nishiura
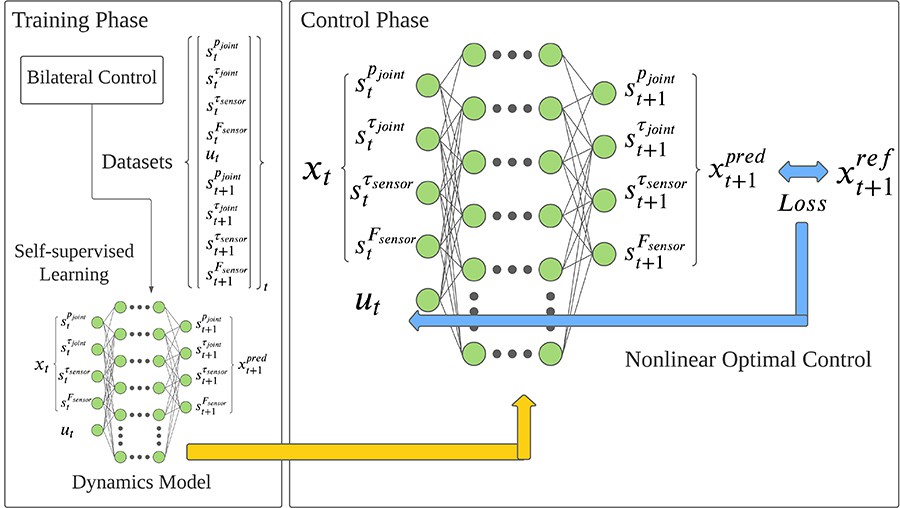
- We feel that robots need to be taught a range of jobs by humans in order to have robots that exist in harmony with human in the home. This is why we have been searching for robotics hardware that works well with learning-based control. In our paper, we selected tasks (work done by robots) that involve a lot of contact with the surrounding environment while also including movements that utilize flexibility to make them human-like, and discussed the hardware requirements that would be suitable to achieve these tasks. We started by analyzing the physical elements of a robot arm and discussing their various effects, and as a result suggested that a robot arm that is low inertia and backdrivable would be good. I am in charge of learning-based control in particular, teaching robots the dynamics (expressing dynamics as state equations) of tasks based on data taken when a person exercises bilateral control (one of the ways to control robots, using bidirectional power transfers through a network), and calculating control inputs using non-linear optimal control, allowing us to get a robot arm to erase a whiteboard (Figure 1). Erasing a whiteboard requires the eraser to be moved while applying pressure to the board. Previously this issue was handled using things like impedance control,*1 but this time we used learning-based control to see if we could get the arm to apply force while moving a little faster. We successfully erased the board using about five times the pressure that was applied by previous control systems, confirming that our proposed robot arm is effective for learning-based control (Video 1).
| *1 | Impedance control This control method uses the mechanical impedances generated when force is applied to the robot arm from outside (inertia, damping factors, stiffness) to control the position and force and set them to the appropriate values for the intended work. |
|---|
-
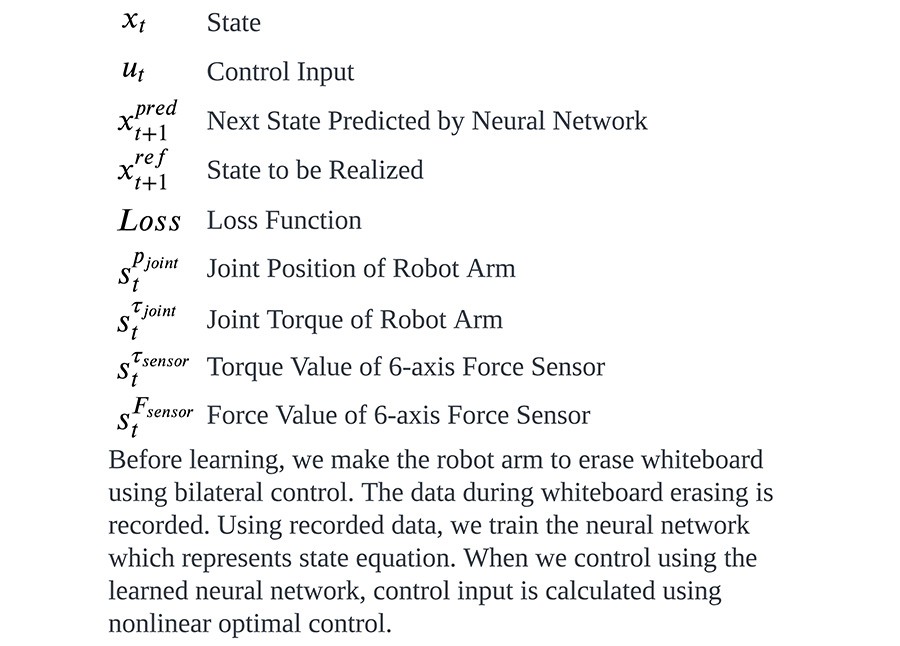
- Image 1: Learning method for control devices that learn the pressure required to erase whiteboards from humans
-
- Video 1: Video of whiteboard erasing (Before learning)
-
- Video 1: Video of whiteboard erasing (After learning)
- When designing this robot arm, what did you pay particular attention to make it able to exist in harmony with human?
- Okumatsu
- When envisioning a robot within the home, a range of issues needs to be addressed, as we noted before. In particular, when considering having it contact its surrounding environment in the same way as humans, we can alleviate the shock when a robot arm touches something by making it easier to move due to external forces. At this point, the robot gets easier to move due to increased backdrivability.*2 Our strength is being able to design in a way that includes both hardware and software, so we aimed to get optimal design values for backdrivability from both of these aspects. We obtained backdrivability requirements for the robot from two tasks: hammering that requires quick movements and erasing a whiteboard while contacting it. Due to lack of space, we only present the whiteboard erasing video at this time.
| *2 | Backdrivability This refers to the ease of movement when a robot or actuator is moved from the outside. If backdrivability is high, the robot or actuator is easy to move using external forces, so it becomes easier for it to contact the surrounding environment or humans. In addition, friction and inertia in reduction gears are a major factor in lowering backdrivability. |
|---|
- What was it like being at the first in-person IROS conference in three years?
- Nishiura
- At IROS 2022, we participated in not only normal technical sessions but also the workshops and tutorials. In particular, the invited presentation at the workshop left a lasting impression. A number of approaches to try to properly fuse learning-based control and model-based control methods were presented, and I learned a great deal.
- I believe Toyota also had a booth at IROS 2022. Did it feature your robot arm?
- Okumatsu
- It did. When we submitted our paper for IROS 2022 in February 2022, we were researching three-axis robot arms. Research on this went well, so in October 2022, when IROS 2022 was held, we were researching six-axis robot arms and exhibited our latest one at the booth (Figure 2). Our research stance is to listen to the opinions of a wide range of researchers and customers by introducing the latest technologies, and to reflect them in our next research themes, while assuming that all necessary procedures, such as patents, have been completed. Within the research at Toyota Frontier Research Center are projects to conduct verification testing and carry out research that incorporates customer opinions.
- What sort of features does the six-axis robot arm have?
- Okumatsu
- Technologically, a six-axis robot arm is, like a three-axis robot arm, a collection of actuators in the shoulder, which lowers the inertia of the overall arm. We also used wire-driven quaternion joints in the robot arm's wrist (Video 2). I hope we can present the details of its structure at a future international robotics conference. In addition, aiming to have robots exist in harmony with human, and pursuing a design that humans can feel at ease around, we styled the robot arm based on the design theme of a bamboo lantern. We worked with the department developing the materials in Toyota to design a wooden structure that would give humans peace of mind.
-

- Image 2: Exhibit booth at IROS 2022
- Video 2: Demonstration task of placing a cup while contacting the table surface
- What sort of research do you want to do in the future?
- Okumatsu
- I've been tackling whiteboard erasing, but in future, I would like to increase the number of tasks a robot arm can do by applying learning-based control so it can do new household tasks while coming into contact with humans and surroundings. In addition, I want to increase the safety of robots by boosting backdrivability. I intend to work even harder on my research to bring about human-friendly robots that can work alongside humans in the home. I would love it if anyone inspired by this article and who wants to work with us on new challenges would contact us at the following.
Contact Information (about this article)
- Frontier Research Center
- xr-probot@mail.toyota.co.jp
RELATED CONTENT
MOST POPULAR