Mar. 19, 2025
CUE6 aims for a Guinness World RecordTM with an ultra-long shot!
The AI basketball robot "CUE" started as a voluntary activity within the company in 2017.*1 By September 2024, "CUE6," the sixth generation, achieved a Guinness World RecordTM with a 24.55m ultra-long shot.*2 This challenge was mainly taken on by three new members who joined the CUE development project. In this interview, we will share their efforts and thoughts leading to the record through interviews with the new members.
- The Challenge of AI Basketball Robot "CUE6" for the Guinness World Record
Introduction of Interviewees
- Keinosuke Soda
- Joined the company as a new graduate in 2023. He has been part of the ultra-long shot project since October 2023, focusing on mechanical design.
- Masatoshi Tsujimura
- Moved to the project in April 2024 after transferring from the automotive semiconductor design department, responsible for the electrical field.
- Ryota Suwa
- Joined the project in May 2024 after transferring from the advanced safety systems development department, focusing on control.
(All are members of the Dynamic Robotics Group, R-Frontier Division, Frontier Research Center)
-
- From right: Soda, Tsujimura, Suwa
Efforts and Technological Advancements in the Guinness World Record Challenge
- I heard that Mr. Soda was the first among the three to join the project. Could you tell us how the development of the ultra-long shot progressed?
- Soda
- We started by understanding the current situation. At the project's start, CUE's longest throw was 18m (achieved in 2021), and the target distance to achieve the Guinness World Record was 24.5m, the distance from one goal to the opposite goal. Improving the throw distance by 6.5m required increasing the basketball's initial velocity, but we didn't know the exact figures. So, we developed a simulation to predict the ball's trajectory by identifying parameters like the drag coefficient and lift coefficient and determined the necessary initial velocity to achieve a 24.5m throw. Setting quantitative goals at the project's outset guided our hardware design approach.
-
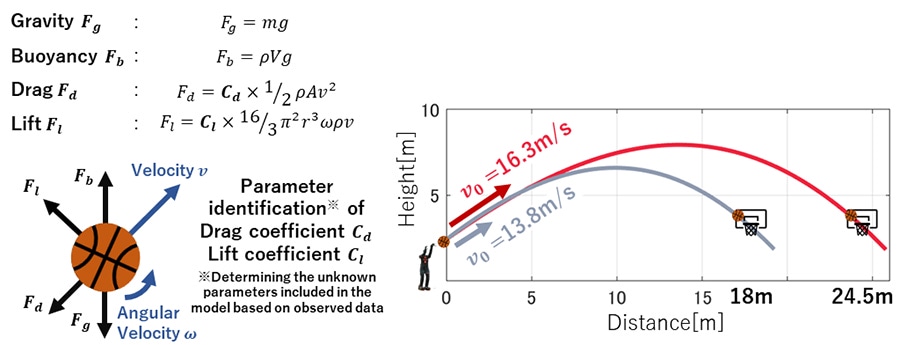
- Calculated initial velocity using Euler's method based on equations of motion
13.8m/s initial velocity for an 18m throw; 16.3m/s needed for a 24.5m throw
- Increasing the ball's initial velocity is crucial. What specific efforts did you make?
- Soda
- We focused on a mechanism called the Parallel Elastic Actuator (PEA) and incorporated it into the ball-throwing right arm. When the elbow bends, a spring compresses, and when it extends, a restoring force assists the motor's torque. This increased the motor's rotation speed, allowing the arm to swing faster. This mechanism helped extend the throw distance to 23m, but we encountered an electrical issue during real-world testing that prevented us from throwing at full power.
-
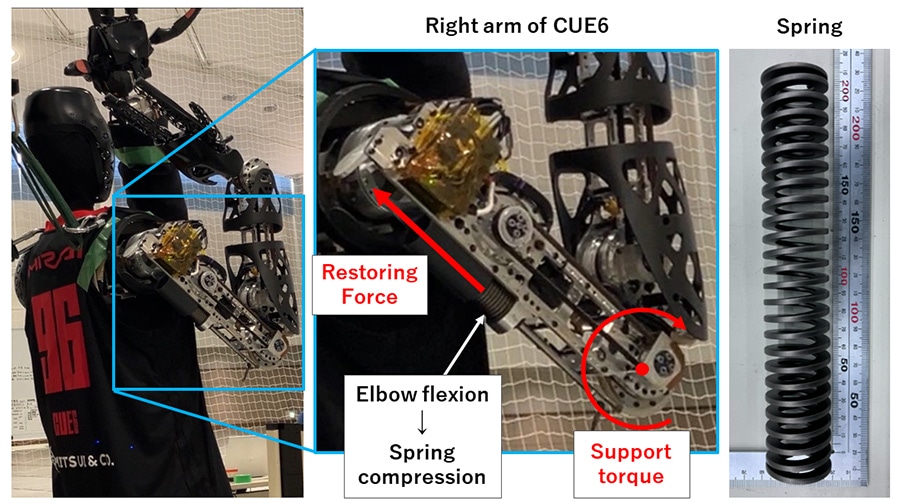
- Utilizing the spring's restoring force to assist the motor's torque
- You mentioned that an electrical problem occurred. What exactly happened?
- Tsujimura
- When we increased the motor output to extend the throwing distance, a communication error occurred, causing the motor to stop during the throw. Specifically, we changed the motor driver and increased the maximum current to 100A, which resulted in a communication error between the motor driver and the encoder.
-
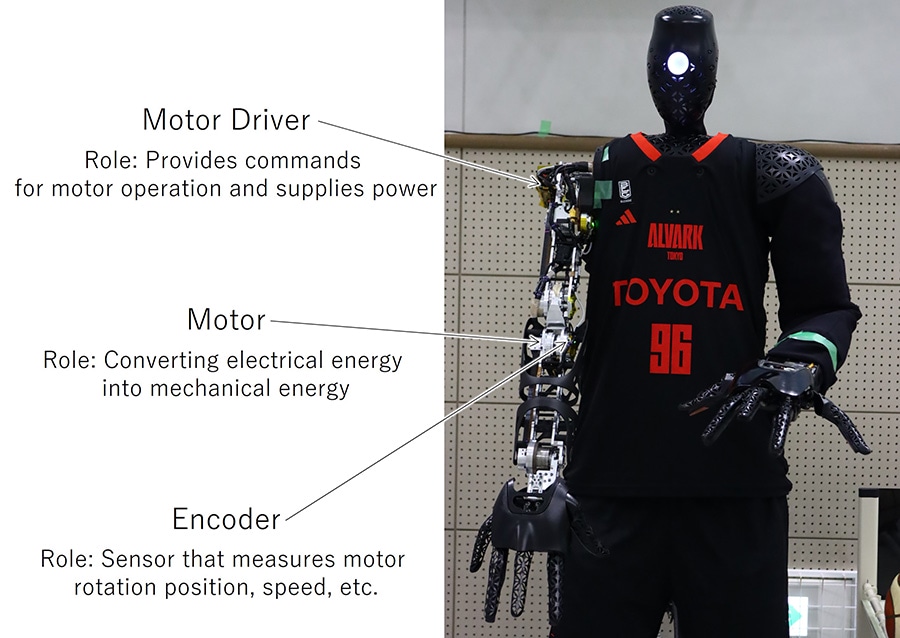
- Equipment related to the communication error
- How did you address this communication error?
- Tsujimura
- First, I wanted to understand what was happening electrically, so I considered using an oscilloscope for measurement. However, the error occurred during the throw, so we needed to connect probes to the rapidly moving arm. As there was no precedent for this, we discussed data collection methods with the relevant parties and devised a special jig and wiring route to capture the communication error waveform on the oscilloscope during the throw. Data analysis revealed that noise from the inverter in the motor driver was entering the encoder line through stray capacitance within the equipment, causing the error and motor stoppage. As a countermeasure, we changed the encoder line connection method to cut off the noise path, which reduced the noise and eliminated the communication error. However, we still fell 1.5m short of our target throwing distance of 24.5m.
-
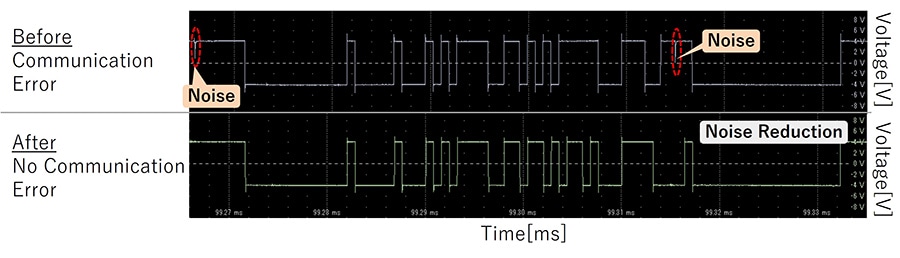
- Oscilloscope waveforms before and after countermeasures
- How did you work toward improving the remaining 1.5m in throwing distance?
- Suwa
- First, let me briefly explain how CUE performs a throw. CUE's throw is executed by controlling the position of each joint axis.

- Suwa
- This equation represents the motion of a single joint axis, and once these four parameters are determined, the motion is set. The combination of these for each joint axis determines CUE's entire sequence of movements. To increase the ball's throwing distance, we treated these parameters as a black-box optimization problem and used Bayesian optimization. We considered the standard deviation of the margin against each axis motor's maximum torque to ensure that the load was not biased toward specific axis motors during the learning process.
-
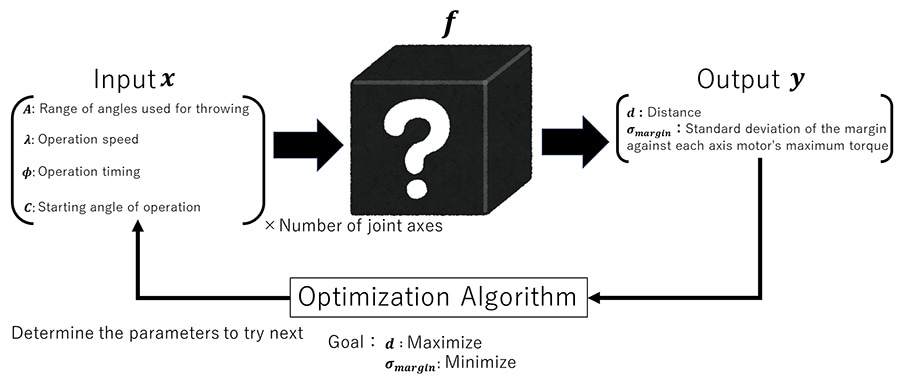
- Throwing learning through Bayesian optimization
- Suwa
- Initially, we were learning using the three axes of the right arm (shoulder, elbow, wrist) and the legs, but there was a limit to improving the ball's initial velocity. So, instead of relying solely on the arms and legs, we considered motions that use the entire body. As a result, we found that tilting the waist back by about 10 degrees improved the initial velocity. We incorporated this new motion and further optimized the continuous movement of the right arm's three axes to maximize the velocity at the hand. Through this process, we achieved the target throwing distance of 24.5m and ultimately set the Guinness World Record.
-
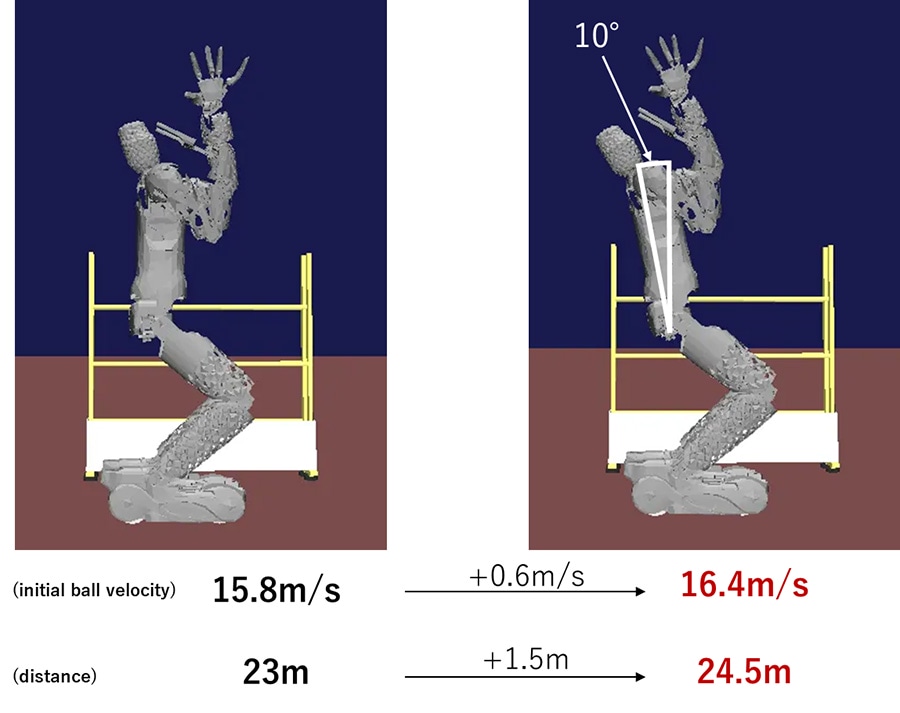
- Comparison of the ball's initial velocities by throwing posture
Achieved 16.4m/s, exceeding the initial target of 16.3m/s
Thoughts from the team members
- You've overcome technical challenges and successfully achieved the Guinness World Record. This project seems to have been a new challenge for all of you, different from your previous specialties. In particular, I heard that this was Mr. Soda's first job since joining the company. Could you share your current thoughts after going through this experience?
- Soda
- I remember feeling excited when my Group Manager told me, "We're aiming for a Guinness World Record with an ultra-long shot," a few months after I joined the company. At that time, I didn't feel anxious because I didn't know how challenging robot development could be. The PEA (mentioned above) using springs was full of unknowns and failures, but thanks to the Frontier Research Center's culture, which allows us to take on challenges without fear of failure, I was able to work on the development freely. When we extended the throwing distance with the completion of the PEA and got closer to our goal, I was especially happy because of all the failures we had experienced. My dream is to inspire and amaze as many people as possible through robot technology. I will continue to strive for technological advancement and aim to be an engineer who can deliver surprises and emotions to the world!
- Mr. Tsujimura, I heard that you suddenly joined the project as a mid-career engineer from a different field. Could you share your honest thoughts now?
- Tsujimura
- I was originally an engineer responsible for designing and evaluating automotive power semiconductors, but due to a business integration, I was transferred to the R-Frontier department. I was completely new to the field of robotics, but I was soon assigned to this Guinness World Record challenge. At the time of my appointment, I was really worried if I could handle it... However, I felt that this transfer was the start of my second career, and I was determined to try everything new, so I felt that the Guinness World Record challenge was an excellent project to work on. This mindset has been my driving force. We will continue to develop CUE to surprise people around the world.
- Lastly, Mr. Suwa, I heard that you voluntarily applied through an internal recruitment to join the project. Could you share your current thoughts after actually joining the team and working on the project?
- Suwa
- Since joining the company, I had been in charge of implementing advanced safety systems for vehicles. But after watching a video introducing Toyota's humanoid robot technology,*3 I strongly felt that I wanted to join the team and develop robot software. So I applied for the internal recruitment. While I was happy to be entrusted with a major project right after the transfer, I keenly felt the difficulty of absorbing new knowledge from scratch and producing results within a limited time frame. Every day is a mix of anxiety and excitement, but I feel a great sense of purpose in this challenging environment. The sense of achievement is extraordinary, especially when I witness the moment the software I developed is reflected in the robot's movements, and I feel my growth as an engineer daily. We will continue to strive for technological advancement so that many people will think, "Toyota's robots, Japan's robots are amazing!"
-

- Scene of discussing the throw
References
| *1 | History of CUE Development |
|---|
Contact Information (about this article)
- Frontier Research Center
- frc_pr@mail.toyota.co.jp
RELATED CONTENT
MOST POPULAR




