Aug. 29, 2024
"Mothership Project" Aiming for Sustained Aerial Platform Vol. 3Achieving Continuous Flight for Over 12 Hours in the Airspace over Fukushima during the Spring Storm Season!
Toyota Motor Corporation abides by the "Five Main Principles of Toyoda," a written statement of the teaching of Sakichi Toyoda, one of which is to "Always be studious and creative, striving to stay ahead of the times." At our Frontier Research Center, we envisage social issues that Japan will face in the future, and in 2018, we launched the "Mothership Project"*1-4 for the future energy security of Japan, which is heavily reliant on imported resources. The project conducts research to fly a large kite in the atmosphere's tropopause region, to utilize the westerly jet stream to generate energy, and to provide other useful services for the world. In order to realize this project, we have conducted the following:
-
- April 2018
- Project launched
-
- July 2018
- Design, fabrication, testing, and evaluation of an "inflatable structure" kite
-
- May 2020
- Achievement of 1,000-meter flight altitude with U.S.-made base material
-
- March 2021
- Completion of development of "new base material" filled with one-of-a-kind technology to achieve flight at high altitudes (introduced in Volume 1*5)
-
- September 2021
- Continuous flight tests using the kite with the new base material. Embarking on the development of attitude control
-
- March 2023
- Achieving 6 hours of continuous flight tests using the kite equipped with attitude control technology (introduced in Volume 2*6)
-
- February 2024
- Conducting a 24-hour continuous flight test at the Fukushima Sky Park*7
In Volume 3, we will introduce the development of the "Onboard Wind Power Generation Device," which supplements the necessary power for long-duration continuous flight through self-generation, and the results of the test conducted in February 2024 confirmed its utility.
Aiming for further improvement in the long-duration flight performance as an aerial platform
To achieve an aerial platform that can act as a mothership, it is necessary to have the capability to stably keep the kite for long periods of time. As mentioned in Volume 2, attitude control requires power to move aerodynamic rudder implementations such as spoilers and coverts (Figure 1). Furthermore, for nighttime flights, the kite is required to have aviation obstruction lights, which also require power. While there is a method to supply power from the ground by using a tether (kite string) as a conductor, it is not realistic because the tether would become excessively heavy and thick, compromising safety. Therefore, we decided to develop a device that generates the necessary power for long-duration stable flight on the kite itself.
-
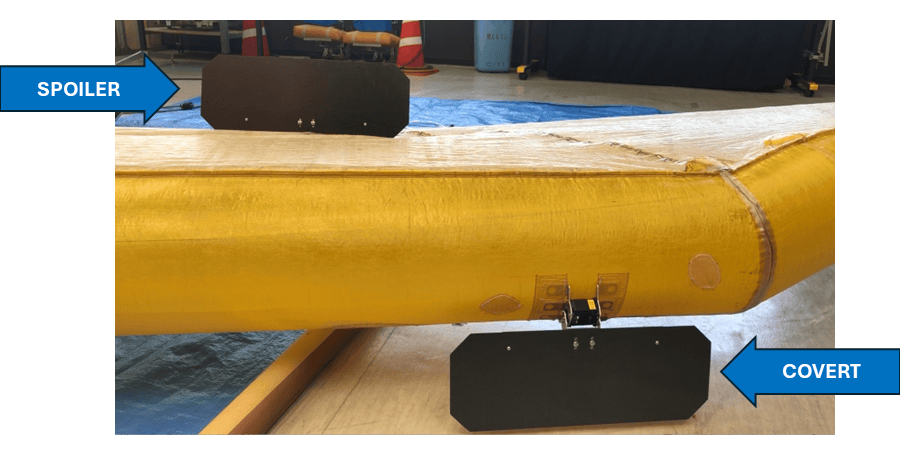
- Figure 1 Aerodynamic rudder implementation. Power is required to move spoilers and coverts.
Regarding the required power, the mothership flies in the tropopause region, where it is exposed to strong westerly winds regardless of day or night, and it is also being pulled by a tether from the ground. Because of this, it is estimated that more power is required to operate the aerodynamic rudders compared to an unmanned aircraft. Additionally, when ascending from the ground, we want to minimize the weight as much as possible. Therefore, we need to minimize the payload, which includes wind power generation, solar panels, and batteries. While solar panels were considered for generating power on the kite, at the moment, there are no thin and lightweight solar panels suitable for the kite's membrane material. That's why we chose a small wind power generation system. When the kite flies in rough wind conditions with strong winds, it consumes a large amount of power for attitude control. Logically, with a wind power generation system, the power generated increases in such windy conditions. Additionally, considering the battery level, it is possible to manage the power by increasing the control frequency. By increasing the size of the wind power generation propeller and increasing the power generation capacity, it may also be possible to supply power to the payload installed on the kite in the near future.
When designing the small wind power generation system, we first calculated the necessary power for attitude control and the power consumption of the aviation obstruction lights based on flight test data under various conditions. Based on this, we determined the required performance of the small wind power generation device to be 6.0 W to 10 W. However, there were no commercially available wind power generation blades that met this performance requirement. Therefore, we used a 3D printer to create the blades ourselves, shaped them while conducting wind tunnel tests to confirm the desired performance, and improved the blade shape (Figure 2). We can improve the aerodynamic performance by hollowing out the blade cross-section and using a slightly thicker airfoil shape. However, due to the time and cost involved in the manufacturing process, we opted for a cambered-plate airfoil. Additionally, for the flight tests, we wanted to make the blades lighter and stronger, so we decided to mold them using carbon fiber-reinforced polymer (CFRP). As a result of molding with CFRP, we were able to significantly reduce the thickness of the blade from 3.0 mm to 0.8 mm (Figure 3-4).
-
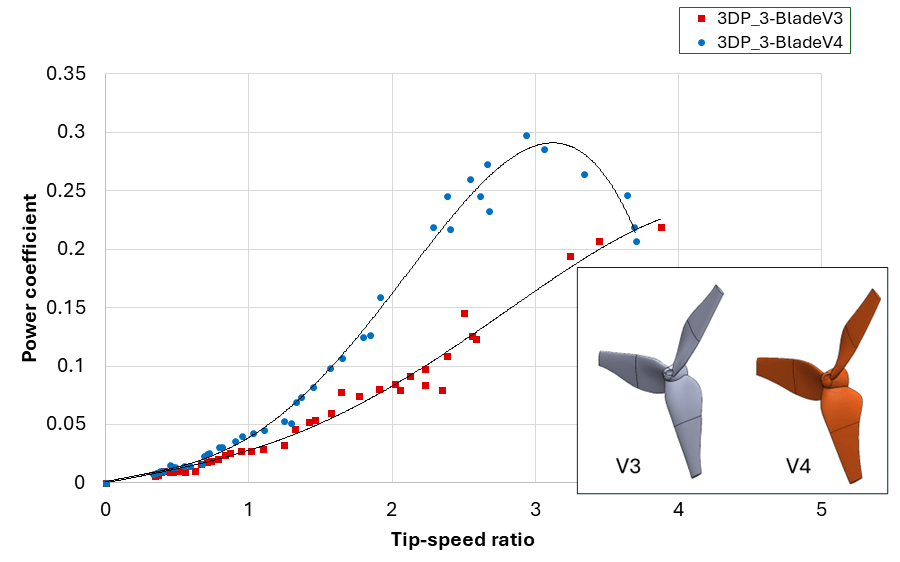
- Figure 2 Improvement of the 3D-printed blades. Changing the blade shape improves power generation. For this test at the Fukushima Sky Park, we shaped the blades to increase power generation from wind speeds of 8.0 m/s to 20 m/s. For westerly winds, we will create a blade with a different shape in the future.
-
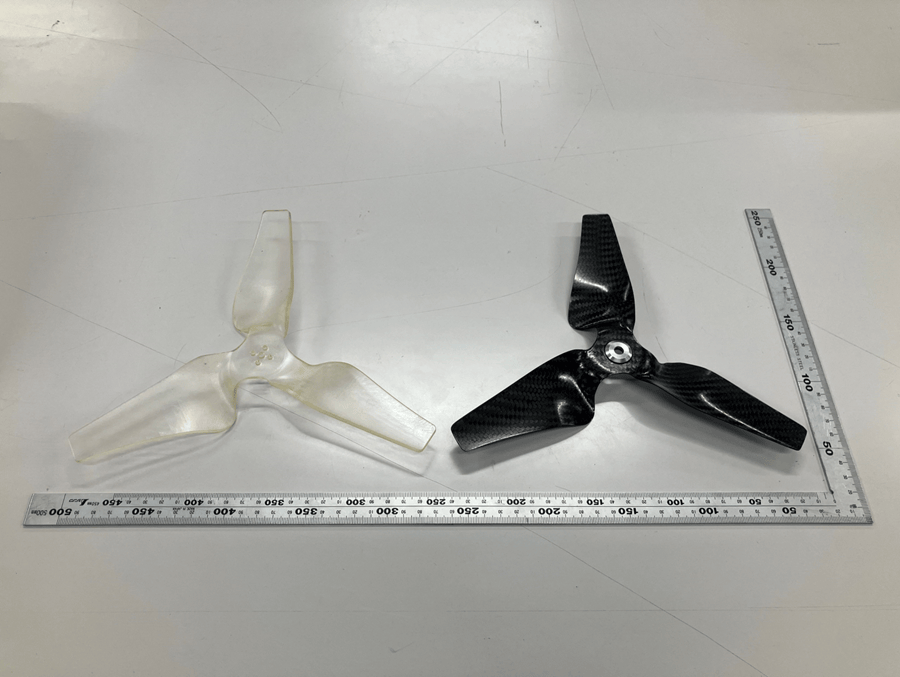
- Figure 3 3D-printed blades (left) and CFRP blades manufactured by Carbon Section, Motomachi Plant Body Manufacturing Div. (right).
-

- Figure 4 Members of Carbon Section, Motomachi Plant Body Manufacturing Div. Carbon Section produces aerodynamic parts for sports cars, among other things. They supported the Mothership Project and quickly produced wind power generation blades for us.
In wind tunnel tests, the small wind power generation device generated electricity under wind forces of 8.0 m/s to 20 m/s, and when the aerodynamic rudder was moved, the required performance was confirmed (Figure 5). In addition, a test flight with a small wind power generation device mounted on a kite at 200 m above the ground confirmed that the device generated sufficient power (Movie 1).
-
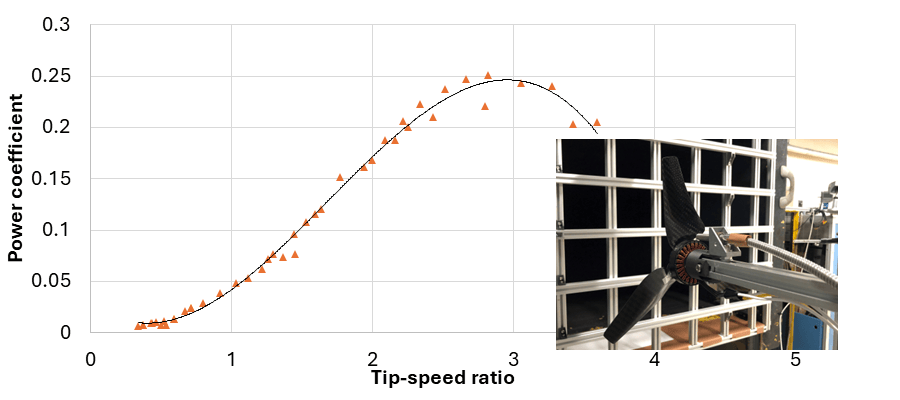
- Figure 5 Component test results in the wind tunnel
- Movie 1 Operation of the power generation device mounted on the kite
Challenging Long-duration Continuous Flight at "Dojo" Fukushima
The location where the continuous flight test was conducted in March 2023 was a facility where night flights were not allowed, so the flight time was limited. We therefore consulted with the Fukushima Prefecture to find a suitable location for the continuous flight test throughout the day, and we decided on the "Fukushima Sky Park" (Fukushima City, Fukushima Prefecture). The reason for this decision was that the necessary facilities for the flight were available and, during the nighttime and winter seasons when the flight field could not be used, we were allowed to use it. Next, regarding the timing of the continuous flight test, we had to determine the test schedule approximately two months before the actual test period due to the facility's availability. Because of this, we could not choose the weather and wind conditions during the test period. Thanks to the support of the Fukushima Sky Park and the City of Fukushima, we set the test period in mid-February, which had stable strong winds remaining during the winter season. However, on the day of the test, the "first spring storm" arrived one month earlier than usual, and Fukushima was hit by a severe storm. However, this storm was favorable for us, as we wanted to improve the performance of the kite.
Ensuring the safety of the team members, we took off as soon as the ground wind was within the safety standards (Movie 2). Despite the strong and turbulent wind conditions, we were able to maintain a stable flight by controlling the attitude more effectively than the previous flight while the kite ascended rapidly. The kite continued to maintain stable flight despite the extremely turbulent wind conditions, with occasional wind speeds exceeding 30 m/s at an altitude of around 600 m during the daytime (Movie 3).
- Movie 2 Takeoff and the rapid ascent of the kite in turbulent wind
- Movie 3 Continuous flight with attitude stability control even in a wind speed of 30 m/s
After about six hours, nightfall arrived, and we started turning on the aviation obstruction lights. Although we were concerned about the battery level due to the higher-than-expected intervention frequency of attitude control caused by the turbulent wind conditions during the daytime, the power generated by the small wind power generation device on the kite remained sufficient, allowing us to continue the nighttime flight with peace of mind (Movie 4).
- Movie 4 Nighttime flight (12 hours elapsed)
However, as the night progressed, the wind gradually calmed down, and at the point when we exceeded 12 hours of continuous flight, there was no wind at all up to 1,000 m altitude, and we had to land after 12 hours and 26 minutes. Although it is still only about half of the target continuous flight time of 24 hours, we were able to set a record for flight time in the project. We also achieved the feat of performing long-duration continuous flight in such turbulent wind conditions with wind speeds exceeding 30 m/s. It is unprecedented for any flying object to continue flying in such wind conditions as far as we know. Additionally, the fact that we were able to gather wind speed data (kite's wind speed meter, Figure 6), altitude data (Figure 7), control frequency data (Figure 8), battery voltage data (Figure 9), and video data of the kite's attitude in such wind conditions is of great significance for the future improvement of the kite's technology. For example, we found that the small wind power generation device generates power excellently in high wind speed conditions. We also learned that by slightly advancing the start of power generation in low wind speed conditions, we can increase power generation and supply power even under unfavorable conditions such as nighttime and low wind speeds.
-
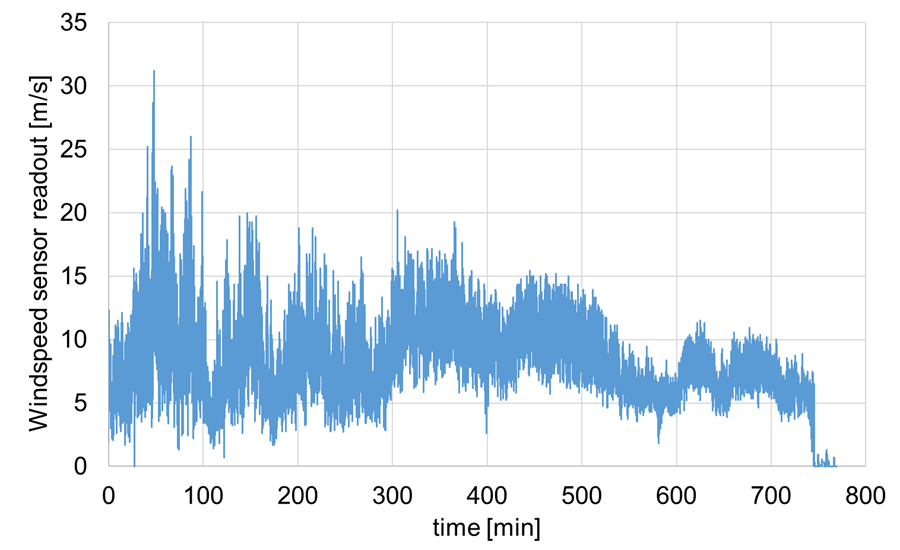
- Figure 6 Wind speed history by anemometer on the kite
-
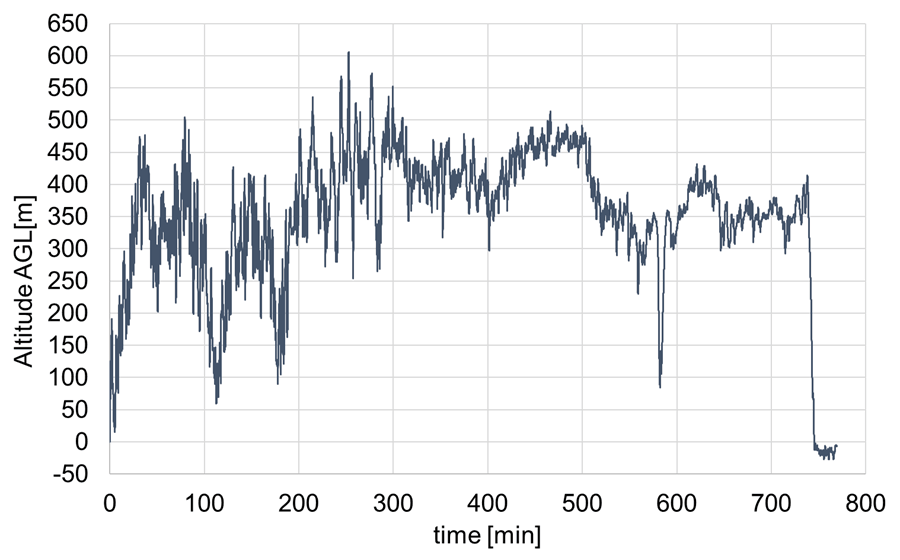
- Figure 7 Kite ground altitude history. Due to an accident during the preliminary test at Fukushima Sky Park during the test period, the prepared tether (2,000 m) had to be cut to 1,300 m. Therefore, the kite's flight altitude was between 300 m and 600 m.
-
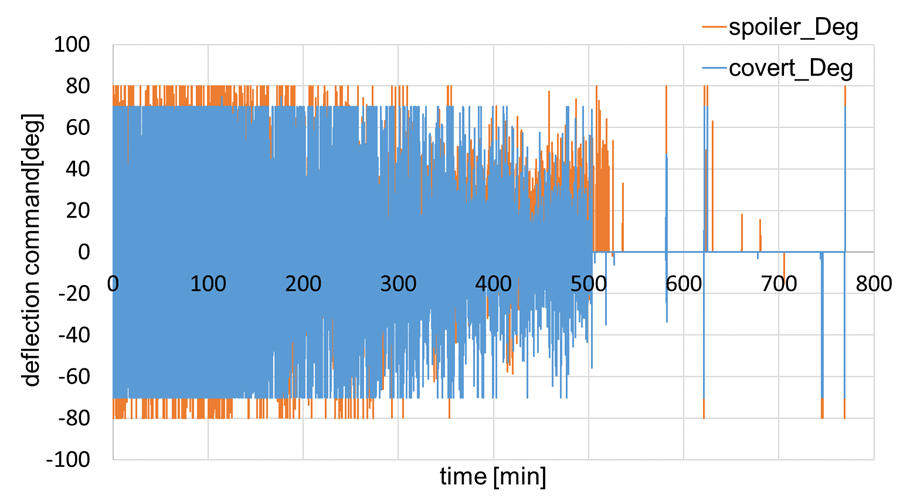
- Figure 8 Frequency history of covert and spoiler control by posture control
-
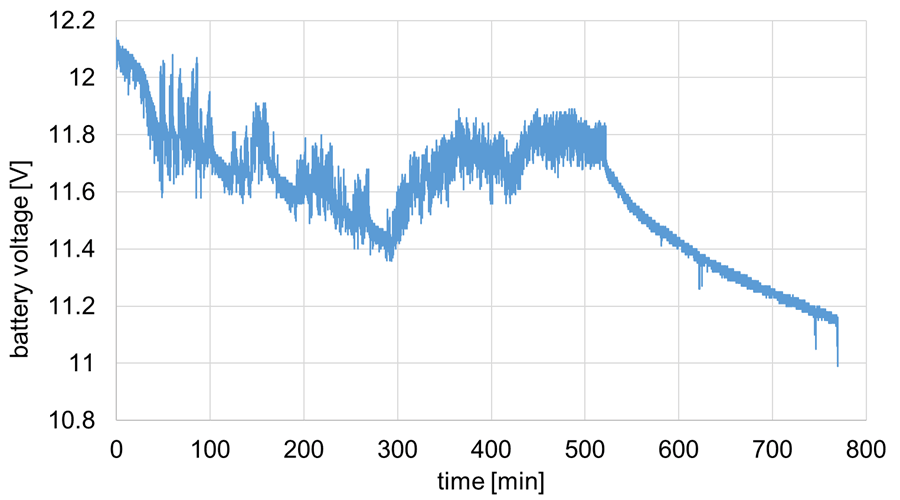
- Figure 9 Battery voltage history on the kite
Future Plan
We have realized that to aim for longer than 24 hours or even longer flight durations, it is necessary to reach a higher altitude with stable and strong winds. To achieve this, we are currently developing a winch capable of flying at an altitude of over 5,000 m. As for the kite itself, we will conduct a new prototype test with a new design introduced in August this year. With the small-scale wind power device used in this challenge, we are now able to perform attitude control technology in strong winds and manage the power during long-duration flights. We aim to achieve 24-hour continuous flight at an altitude of 5,000 m, which is the lower end of the westerlies, in October this year. Furthermore, we are aiming for an 8-day continuous flight in February 2025 as a longer-duration flight, and we are progressing with our team and development. With the achievements of this altitude and flight duration, we will be confident in introducing the kite system for weather*8, communication, small-scale power generation, and other considerations even before achieving the final vision of the mothership. We believe that this will help us build connections and collaborations.
We dream of someday making the "Mothership" a reality, and we will continue taking on our challenges.
Side Note: I had the opportunity to present at the AIAA SciTech 2024!
At the American Institute of Aeronautics and Astronautics (AIAA) SciTech 2024, which is the largest international conference on advanced technology organized by the AIAA, held in Florida, USA in January this year, I had the privilege of delivering a session titled "Novel Concepts: Toyota Mothership, High Altitude Aerial Platform Project." We presented three papers from Toyota, two from Toyota Research Institute North America (TRINA), and one from Virginia Tech, which is conducting joint research with TRINA. On the day of the presentation, there was a large audience, and we received numerous questions and inquiries not only during the session but also afterward. It made me realize that this project is gaining recognition among researchers worldwide and that there is great interest in the unique Japanese technology used in the development of new materials. In particular, our development approach of first grasping the phenomenon from an observational standpoint, formulating hypotheses, conducting model analysis to understand the principles and propose countermeasures, and confirming the effectiveness of the countermeasures while performing flight tests garnered a lot of inquiries from aviation professionals, some of which led to new collaborative research. Thanks to the success of this year's AIAA SciTech, we have been fortunate enough to secure two session slots for the same topic at the AIAA SciTech 2025. We plan to present together with universities and researchers who have assisted us in joint research for the Mothership Project, including Toyota and TRINA. Furthermore, to my surprise, I have been assigned as a reviewer for Computational Fluid Dynamics (CFD) in aerodynamics by AIAA. I heard that the reason for the assignment was the recognition of the Mothership Project's reputation, development strategy, and academic achievements, and as someone who has been involved in aerospace engineering for over 40 years, I consider it the highest praise.
-

- Author presenting on stage
-
- Toyota, TRINA presenters
Author
Eiji Itakura
Eiji Itakura was a core team member during type certification and production certification missions when Toyota was involved in aircraft engine development. Since then, he has been involved in future mobility planning and research. His dream is the realization of the Mothership Project. Since the Mothership Project is an aggregation of various research and technologies, we are considering whether it can also be a platform for "cutting-edge research and technologies that are not well known to the public at the moment". If you are interested, please contact us.
References
Contact Information (about this article)
- Frontier Research Center
- frc_pr@mail.toyota.co.jp
RELATED CONTENT
MOST POPULAR