-

- フェロー* Gill A. Pratt(ギル プラット)
-
*2019年12月時点の役職名です
1990年代から、トヨタは交通事故死傷者ゼロを第一の目標として、予防安全と自動運転技術の研究開発に取り組んできました。
現在、トヨタは「Mobility Teammate Concept」という考え方に基づいて研究開発を進めています。このコンセプトは、人とクルマが同じ目的で、ある時は見守り、ある時は助け合う、気持ちが通った仲間(パートナー)のような関係を築くトヨタ独自の自動運転の考え方です。
トヨタは、運転が自動化された将来においても、クルマが愛され続けると信じています。そして、予防安全と自動運転技術によってすべての人の移動の自由を広げます。例えば、運転に困難を伴う方々に対し、運転をサポートし、より自立した生活を可能にします。これらの技術とコネクティッド技術とを組み合わせることによって、交通渋滞の軽減や、クルマの排気ガスによる大気汚染低減にも寄与すると考えています。
トヨタの予防安全と自動運転の研究開発の枠組み
予防安全と自動運転について、トヨタはグループとして研究、技術開発に取り組んでいます。
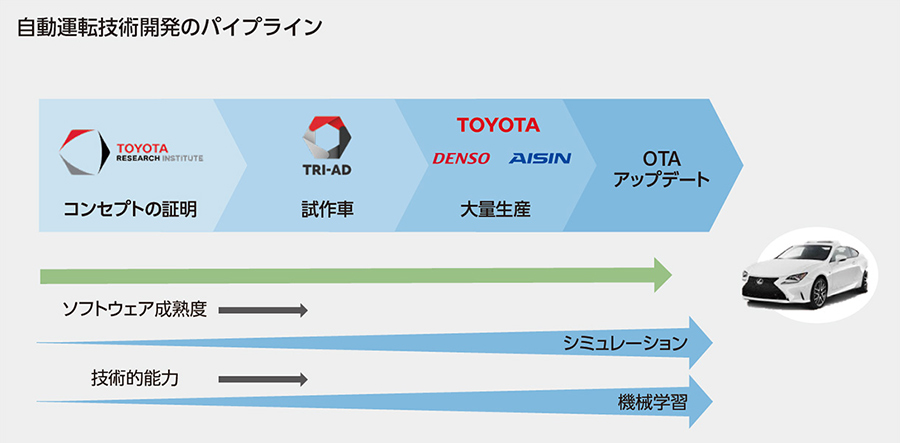
Toyota Research Institute(以下TRI)はシリコンバレーに本社を置き、人工知能や自動運転・ロボティクスなどの研究開発を行っています。TRIは、米国ミシガン州アナーバーとマサチューセッツ州ケンブリッジにある拠点などを通じて大学と緊密に連携を取っています。
トヨタモーターヨーロッパでは認識技術を研究、豊田中央研究所ではセンサー技術の改善に注力しています。
東京のToyota Research Institute-Advanced Development(以下TRI-AD)は、シリコンバレーのイノベーションと日本の精緻なモノづくりをつなぐ架け橋となり、確かな品質のソフトウェア開発を推進し、トヨタ車に搭載していきます。TRIによる自動運転に関する先進研究を元にTRI-ADがソフトウェアを成熟させ、トヨタのつくる高品質のハードウェアの上に実装していきます。お客様の手に渡る販売時点だけでなく、継続的にパフォーマンスを向上し機能を追加できるよう、Over-The-Air(OTA)による更新も見据えたソフトウェア開発を行っています。TRI-ADはこのような役割を果たすことで、自動運転車に組み込んでも十分な製品品質レベルを持つ、世界トップレベルのソフトウェア開発を目指しています。
量産については、トヨタとTRI-ADが、車両統合制御システム会社である株式会社J-QuAD DYNAMICS(株式会社デンソー、アイシン精機株式会社、株式会社アドヴィックス、株式会社ジェイテクトの合弁会社として設立)と共同で取り組んでいます。開発から製造まで協力体制を敷き、チーム一丸となって取り組んでいきます。
予防安全と自動運転に対するトヨタ独自のアプローチ
トヨタは、「トヨタガーディアン」と「トヨタショーファー」の2種類のアプローチで、予防安全と自動運転システムを開発しています。
「ショーファー」は車両が自律走行できるようになることを目指し、究極的には、人間による監視や緊急時の操作がなくても運転できる状態を目標としています。このアプローチによって、年齢や心身の状態、その他の理由で現在運転できない人にも移動の自由を提供します。テクノロジーの視点からは、機械をどのように訓練して、刻一刻と変化する環境を認識し、運転する力を身につけられるかということが重要です。社会の視点からは、たとえ頻度が低く、不可避な衝突であっても、無人運転車による事故が世間に受け入れられるには時間がかかるであろうということを認識しています。
このような困難を克服するため、トヨタは、「ショーファー」と同様の基盤技術を使用して、「Mobility Teammate Concept」の下、「ガーディアン」システムを開発しています。このアプローチは、ドライバーの能力に取って代わるのではなく、拡充・強化することで、安全性を向上させるように設計されています。運転操作が能力の限界に近づいているときや能力を超えたとき、ドライバーをシームレスに支援します。今後は、これらのシステムとハードウェアをより多くのクルマに展開していきたいと考えています。
「ガーディアン」は、トヨタや他社によって開発された、レベル4およびレベル5の自動運転システムと組み合わせ、安全性と品質を向上させることが可能です。言い換えれば、「ガーディアン」は、ショーファー型システムのバックアップとしても機能し、別のシステムに重ね合わせることで、システム障害の可能性を低くすることができます。
2019年12月
フェロー Gill A. Pratt(ギル プラット) -