2025年03月19日
CUE6超ロングシュートでギネス世界記録TMへ挑戦!

2017年社内の自主活動でスタートしたAIバスケットボールロボット「CUE」*1。第6世代まで進化した「CUE6」が2024年9月に24.55mの超ロングシュートでギネス世界記録TMを達成しました*2。その挑戦は、新たにCUE開発プロジェクトに加わったメンバーを中心に取り組みました。今回は、その新しいメンバー三人へのインタビューを通して、超ロングシュートでのギネス世界記録達成までの取り組みや思いについてお伝えします。
- AIバスケットボールロボット「CUE6」ギネス世界記録への挑戦
インタビュー対応者の紹介
早田 圭之介(そうだ けいのすけ)
2023年度新卒入社。2023年10月から超ロングシュートプロジェクトに参加。メカ設計分野を担当
辻村 理俊(つじむら まさとし)
2024年4月に車載半導体の設計部署から異動後、同プロジェクトに参加。電気分野を担当
諏訪 凌太(すわ りょうた)
2024年5月に先進安全システムの開発部署から異動後、同プロジェクトに参加。制御分野を担当
(全員、未来創生センター R-フロンティア部 ダイナミックロボティクスグループに所属)
-
- 右から順に、早田さん、辻村さん、諏訪さん
ギネス世界記録挑戦への取り組みと技術的な進化点
-早田さんは三人の中で一番最初から今回のプロジェクトに参加されていたと伺いましたが、どのように超ロングシュート開発を進めたのか教えてください。
- 早田
- まずは現状把握から始めました。プロジェクト開始時点のCUEの投球最長飛距離は18mであり(2021年達成)、ギネス世界記録達成にむけた目標飛距離は一方のゴールから反対側のゴールまでの距離である24.5mです。6.5mの飛距離向上にはバスケットボールの初速向上が必要でしたが、具体的な数値はわかりませんでした。そこで、抗力係数と揚力係数のパラメーター同定によりボールの軌道を予測するシミュレーションを開発し、飛距離24.5mを達成するために必要なボールの初速を求めました。プロジェクトの最初に定量的な目標を定めたことで、どんなハードウェアを設計していくかの指針を立てることができました。
-
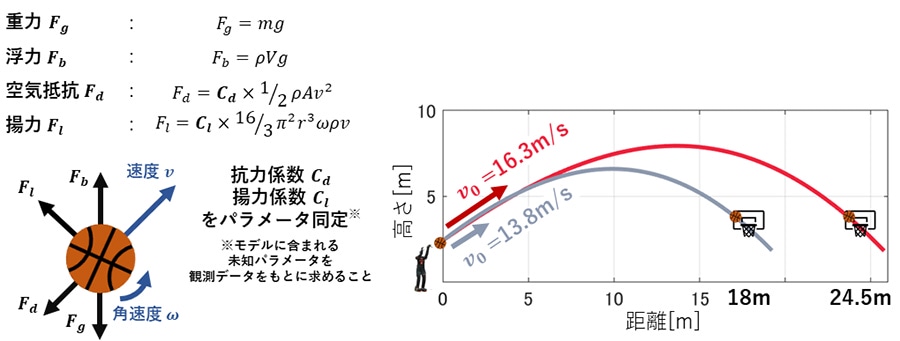
- 運動方程式に基づきオイラー法による逐次計算からボールの初速を算出
18m投球時のボールの初速は13.8m/sに対して、24.5m投球時は16.3m/sが必要
-ボールの初速向上が肝なのですね。具体的にはどのような取り組みをしましたか?
- 早田
- Parallel Elastic Actuator(PEA)と呼ばれる機構に着目し、ボールを投げる右腕に搭載しました。肘を曲げるとばねが縮み、肘を伸ばす向きに復元力が加わることでモーターのトルクを補助する機構となっています。これにより、モーターの回転速度を上げ、より速く腕を振れるようになりました。この機構によって飛距離を23mまで伸ばす目途付けができましたが、実は、実機実験で電気的なトラブルが発生し、100%の出力で投球できなくなってしまいました。
-
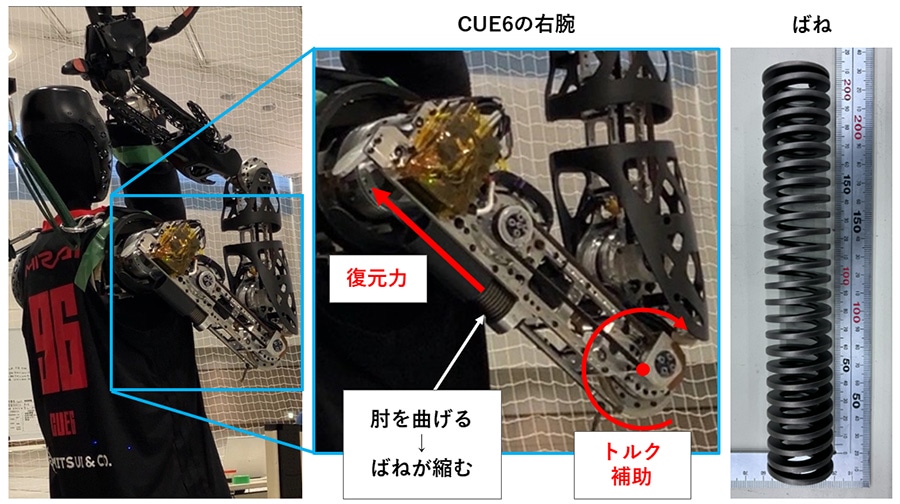
- ばねの復元力を利用したモーターのトルク補助
-電気的なトラブルが発生したということですが、どのようなことが起きましたか?
- 辻村
- 飛距離を伸ばすためにモーター出力を増加させたところ、通信異常が発生し、投球中にモーターが停止してしまいました。具体的にはモータードライバーを変更し最大電流を100Aまで増加させたところ、モータードライバーとエンコーダ間で通信異常が発生していることがわかりました。
-

- 通信異常発生に関連する各機器
-この通信異常はどのように対策しましたか?
- 辻村
- まず、電気的に何が起こっているのか把握したいと思い、オシロスコープで計測できないかと考えました。ただ、異常が発生するタイミングは投球中のため、高速で動作する腕にプローブを接続しなければなりません。前例が無かったため、関係者とデータ取得方法を議論し、専用の治具と配線経路の工夫で、投球中の通信異常波形をオシロスコープで取得できるようになりました。データ分析の結果、モータードライバー内のインバータから発生するノイズが機器内の浮遊容量などを介してエンコーダ線に混入したことで、異常が発生し、モーターが停止していたのだとわかりました。その対策として、ノイズが流れる経路を断つようにエンコーダ線の接続方法を変更した結果、ノイズを低減でき通信異常が発生しなくなりました。それでも、目標の飛距離24.5mに対して、1.5m足りませんでした。
-
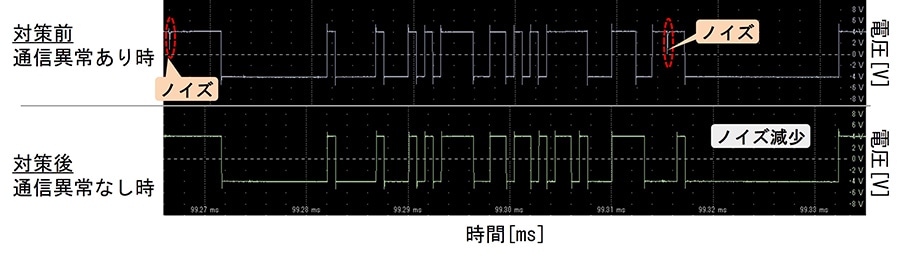
- 対策前後のオシロスコープ波形
-残り1.5mの飛距離向上にむけて、どのように取り組みましたか?
- 諏訪
- まず、CUEがどのように投球を行っているかを簡単に説明します。CUEによる投球は、各関節軸の位置制御により行っています。

- 諏訪
- この式はある関節軸の動作を表現したもので、上記の4つのパラメーターが決まると動作が決定されます。これらが関節軸数分組み合わさることにより、CUEの一連の動作が決まります。ボールの飛距離を伸ばすにあたり、これらのパラメーターをブラックボックス最適化問題として、ベイズ最適化を用いて、特定の軸のモーターに対して負荷が偏らないよう、各軸モーターの最大トルクに対するマージンの標準偏差が小さくなるよう考慮しながら学習しています。
-
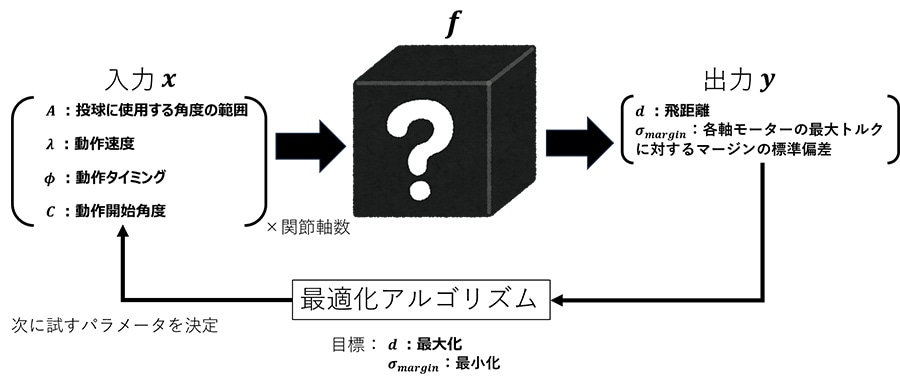
- ベイズ最適化による投球学習
- 諏訪
- 当初は右腕の三軸(肩、肘、手首)と脚を使って学習していましたが、ボールの初速向上には限界がありました。そこで、腕と脚だけに頼らず、体全体を使う動作を検討した結果、腰を後ろに10°ほど倒すことで初速が向上することがわかりました。この新たな動作を取り入れ、さらに、右腕の三軸が連続的に動作するように最適化し、手先の速度が最大となるように学習を進めました。これにより、目標の飛距離24.5mを実現し、最終的にギネス世界記録を達成できました。
-
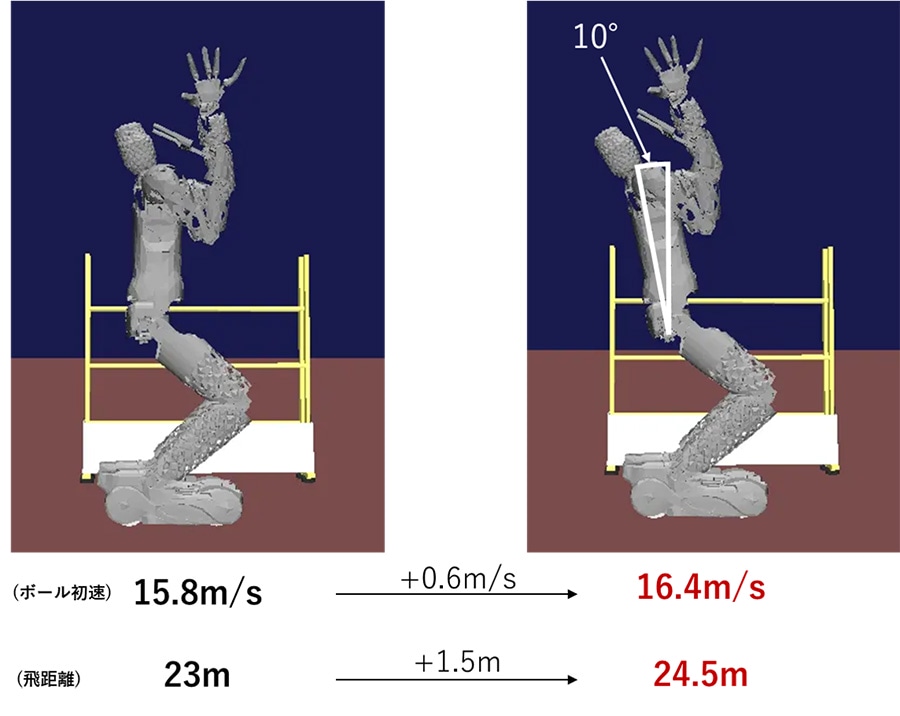
- 投球姿勢によるボール初速の比較
当初目標の16.3m/sを超える16.4m/sを実現
担当者の思い
-技術課題を克服して無事にギネス世界記録を達成されたということですが、今回のプロジェクトは皆さんにとって、これまでの専門と異なる新しいチャレンジだったかと思います。特に、早田さんは入社して最初の仕事だったと聞きましたが、活動を通じて感じた今の思いについて聞かせてください。
- 早田
- 入社して数ヶ月経ったころ「超ロングシュートでギネス世界記録を狙う」と上司に言われたときはワクワクしたのを覚えています。当時はロボット開発の大変さを知らなかったからこそ不安を感じませんでした。ばねを使用したPEA(上述)はわからないことばかりで失敗の連続でしたが、失敗を恐れず挑戦させてもらえる未来創生センターの風土のおかげで、のびのび開発に取り組むことができました。PEAの完成によって飛距離を伸ばし目標に近づけたときは、多くの失敗があったからこそ余計にうれしかったです。ロボット技術を通して少しでも多くの人に驚きや感動を与えたい、というのが私の夢です。今後も技術進化に尽力し、驚きと感動を世界に届けられるような技術者を目指します!
-次に辻村さんは中堅の技術者で他分野から突然プロジェクトに加わることになったと伺いました。今の率直な思いを教えてください。
- 辻村
- 私は元々車載用パワー半導体の設計や評価を担当してきた技術者でしたが、事業統合の都合で縁あってR-フロンティア部に異動することになりました。ロボット分野については全くの専門外だったのですが、早々に今回のギネス世界記録挑戦の担当を任され、着任当時は、本当に私で大丈夫なのだろうか……と心配でした。ただ、今回の異動は第二の会社人生のスタートであり新しいことは全て挑戦してみよう、という気持ちでいたので、ギネス世界記録挑戦はとてもよいテーマをもらったとも感じ、そこを原動力に進めてきました。今後も世界中の方に驚いていただけるよう、CUEの開発を進めていきます。
-最後に諏訪さんは社内公募で自ら手を挙げてプロジェクトに加わったと伺いました。実際にチームに加わり活動してみた今の思いを教えてください。
- 諏訪
- 私は入社以来、車両の先進安全システムの搭載業務を担当していましたが、トヨタのヒューマノイドロボットの技術について紹介した動画*3を見て、自分も仲間に加わってロボットのソフトウェア開発がしたいと強く思い、社内公募に応募しました。異動直後から大きなプロジェクトを任せていただいたことにうれしさを感じる一方で、ゼロから新しい知識を吸収しつつ、限られた期限内で成果を出す難しさを痛感しています。不安とワクワクが交錯する毎日ですが、チャレンジングな環境の中で多くのやりがいを感じています。特に自分が開発したソフトウェアがロボットの動きに反映される瞬間を目の当たりにしたときの達成感は格別で、技術者としての成長を日々実感しています。多くの方にトヨタのロボット、日本のロボットはすごい!と思っていただけるよう、これからも技術向上に励みます。
-

- 投球の検討をしている様子
参考情報
| *1 | History of CUE Development |
|---|
本件に関するお問い合わせ先
- 未来創生センター
- メールアドレスfrc_pr@mail.toyota.co.jp
関連コンテンツ
アクセスランキング




