
2023年01月12日
ロボットと一緒に家事をする生活を目指した、「人にやさしいロボットアーム」の研究~若手研究者とリーダーの研究にかける想い~

トヨタ自動車株式会社(以下、トヨタ)の未来創生センターでは、家庭内で人と共存し、人と同じような仕事をすることで、人の役に立つロボットの研究に取り組んでいます。最近、工場の中などで人共存ロボットとして使われる協働ロボットがあります。これら産業用ロボットは、アームの位置や姿勢を制御しているのに対して、トヨタの人共存型ロボットアームは、周囲環境との接触を多く伴う作業においてアームや手先にかかる力を制御することで、人共存を実現しようとしています。またその研究成果の一部を2022年10月に開催されたロボットの国際学会IROS2022(The 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems)において発表1しました。今回、人共存型ロボットアーム研究のプロジェクトリーダーの奥松とメンバーの西浦に研究の目的や概要、IROS2022での発表内容を伺いました。
-

- 今回のインタビュー回答者(左から)、奥松 美宏(マニピュレーター研究チームリーダー)、西浦 学(同チームメンバー)
-トヨタでは多くのロボットを研究開発していますが、この人共存型ロボットアームの研究を始めたきっかけを教えてください
- 奥松
- トヨタではこれまでも生活支援ロボット(Human Support Robot, HSR)を始め、人との共存を目指したロボットを研究開発してきました。しかし、家庭内で活躍するロボットは様々な人に対してサービスを提供しなければならなかったり、時々刻々と変わる家庭内の環境に適応しなければならなかったりと、解決しなければいけない課題が多くあります。特に、家庭内ロボットは安全性を考慮しているため作業動作が非常に遅く、中にはロボットの動作が完了するのを待っていられないと言う人もいらっしゃいます。そこで、人と同じ空間にいて、人と同じように周囲環境と接触しながら、人と同じ速度で作業ができるロボットアームを実現するために、ハードウェアの構造から根本的に見直そう!ということになり、このプロジェクトがスタートしました。余談ですが、このように研究者自身が持っている課題に対して新しい、しかも大きなチャレンジができるところが未来創生センターの魅力だと思っています。
-ロボットの研究は大学や企業など多くの研究機関で実施されていますが、トヨタのロボット研究開発の特長を教えてください
- 奥松
- トヨタのロボット研究開発の特長はハードウェアとソフトウェアの両方を実施している点です。シナジー効果を生むためにハードウェアとソフトウェアの担当者がなるべく近い場所で研究しています。一般にソフトウェア開発に比べて、ハードウェアの開発にはより長い時間がかかってしまうのですが、トヨタでは簡単なハードウェアの試作品を作り、試作のソフトウェアで動かしてみることで、ソフトウェアやハードウェアの仕様にフィードバックしています。もちろん、事前にシミュレーションを行って、適切な条件を検討することもしています。このサイクルをスピーディに繰り返していくことで、ハードウェアとソフトウェアのシナジー効果が最大限に発揮され我々の研究のスピードも加速されます。
- 西浦
- ハードウェア、ソフトウェアそれぞれの専門家がいて議論しながら進められるところが良いと思います。私はマニピュレーター、いわゆるロボットアームの制御ソフトウェアの研究を担当していますが、ハードウェアに不具合があったときはもちろん、制御を考える上で「ハードウェアをもっとこうしたい」という要望があった場合もハードウェアの担当者に伝えれば、すぐに改良してくれます。
-IROS2022で発表した内容について教えてもらえますか
- 西浦
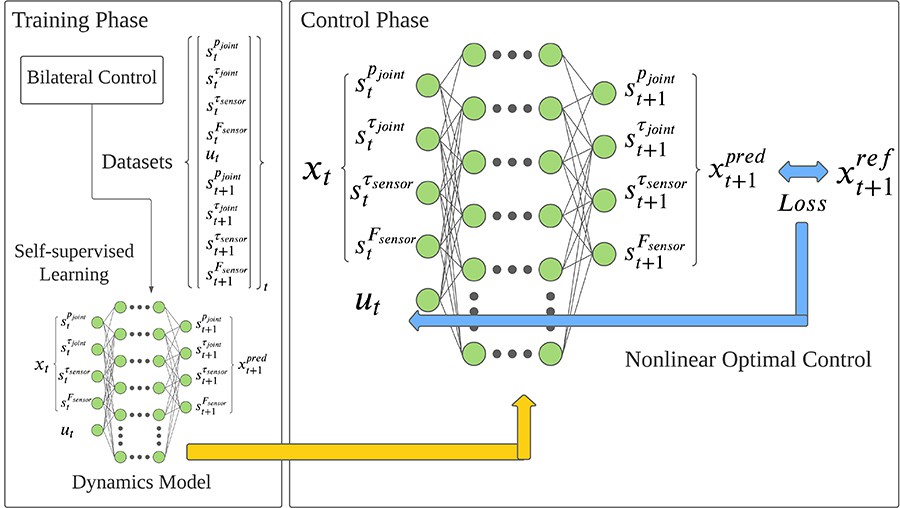
- 家庭内で人と共存するロボットを実現するためには、ロボットが人から様々な仕事を教わることが必要だと考えています。そのため、学習ベースの制御に適したロボットハードウェアを模索していました。論文では、人間らしい動作として「しなやかさ」を活かした動きを含みつつ、周囲環境との接触を多く伴うようなタスク(ロボットが行う作業)を選び、それらのタスクを実現しやすいハードウェア要求を論じました。まずロボットアームを物理要素に分解してそれぞれの影響を議論し、その結果として「低慣性で逆駆動しやすいロボットアームが良いのではないか」と提案しました。私は特に学習ベースの制御を担当し、人がバイラテラル制御(ロボット制御の一つ。ネットワークを介して双方向に力を伝達し制御)した時のデータからロボットにタスクのダイナミクス(動力学を状態方程式で表現したもの)を学習させ、非線形最適制御を用いて制御入力を計算することで、ロボットアームにホワイトボード消しのタスクを実施させました(図1)。ホワイトボード消しはボードに対して力をかけながらホワイトボードイレーザーを動かす必要があり、そのような課題には従来はインピーダンス制御*1などが用いられてきましたが、今回は学習ベースの制御を用いて、もう少し早い速度で動きながら力をかけるということに挑戦しました。結果として従来型の制御器に比べて5倍ほど力をかけて拭くことに成功し、提案したロボットアームが学習ベースの制御に適していることを確認しました(動画1)。
| *1 | インピーダンス制御 ロボットアームの場合、ロボットアームに外から力を加えた場合に生じる機械的なインピーダンス(慣性、減衰係数、剛性)を、目的とする作業に都合の良い値に設定するための位置と力の制御手法 |
|---|
-
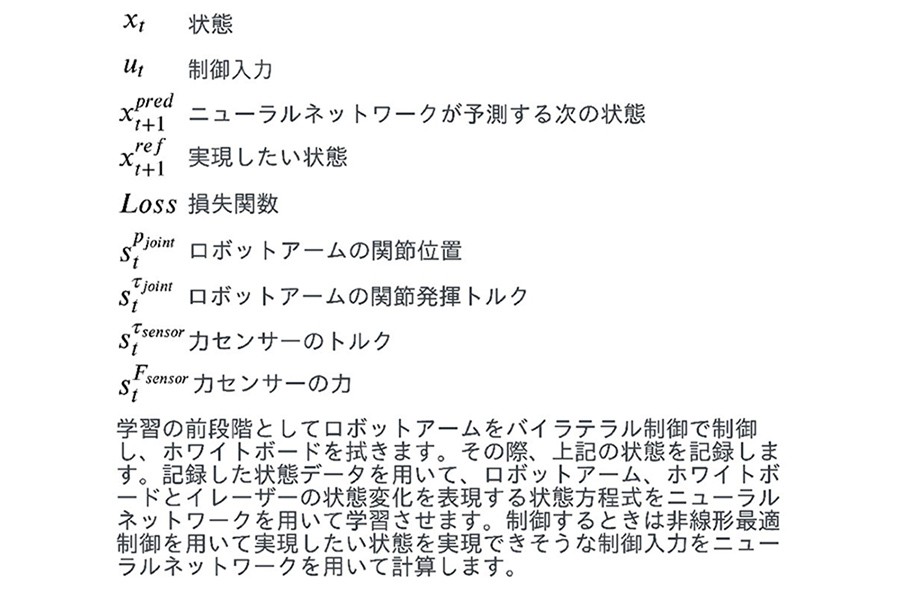
- 図1 人からホワイトボード消しの力操作を学ぶ制御器の学習方法
-
- 動画1 ホワイトボード消しの動画(学習前)
-
- 動画1 ホワイトボード消しの動画(学習後)
-今回のロボットアームを設計する際、特に人共存型ということで工夫した点を教えてください
- 奥松
- 家庭内でロボットを使うことを想定すると、先述のように様々な課題が要求されます。中でも、人と同じように周囲環境と接触することを考慮すると、外力に対してロボットアームを動かしやすくしていた方が接触の際の衝撃を緩和することができます。この時、ロボットはバックドライバビリティ*2を高くするとより動かしやすくなります。我々は、ハードウェアとソフトウェアを含めた設計ができるのが強みなので、その両面からバックドライバビリティの最適な設計値を求めるということを目指しました。今回は素早い動作が必要なハンマー打ちと接触しながら動作が必要なホワイトボード消しの2つのタスクから必要なバックドライバビリティを求めました。今回は紙面の都合上ホワイトボード消しの動画のみ紹介しています。
| *2 | バックドライバビリティ ロボットやアクチュエーターを外側から動かしたときの動かしやすさを表す。バックドライバビリティが高いと外力に対してロボットやアクチュエーターが外から動かしやすいため、周囲の環境や人との接触が容易になる。また、減速機の摩擦や慣性がバックドライバビリティの低下の大きな要因になる。 |
|---|
-3年ぶりにリアル開催されたIROS2022の様子はいかがでしたか?
- 西浦
- IROS2022では通常のテクニカルセッションだけでなく、ワークショップ、チュートリアルまで含めて参加させていただきました。特にワークショップの招待講演が印象に残っていて、学習ベースの制御手法とモデルベースの制御手法をうまく融合させようとするアプローチが様々提案されており、非常に勉強になりました。
-今回のIROS2022ではトヨタはブースを出展したそうですが、ロボットアームは展示しましたか?
- 奥松
- はい。IROS2022の論文投稿時の2022年2月の時点では3軸ロボットアームを研究していましたが、その後研究が進み、IROS2022が開催された2022年10月には6軸ロボットアームの研究をしていました。そのため、ブースでは最新の6軸ロボットアームを展示しました(図2)。我々が研究で心掛けているのは、特許など必要な手続きは全て終わっていることが前提になりますが、最新の技術をオープンにすることで様々な研究者やお客様の意見を伺い、次の研究テーマに反映させていくことです。未来創生センターの研究の中には実証実験を実施し、お客様の意見を取り入れながら研究を進めているプロジェクトもあります。
-6軸になったロボットアームはどんな特長がありますか?
- 奥松
- 技術的には6軸ロボットアームも、3軸ロボットアーム同様にアーム根本にアクチュエーターを集めることで、ロボットアーム全体の慣性を下げました。またにロボットアームの手首にはクォータニオンジョイント(Quaternion Joint)と言われるワイヤー駆動の機構を用いました(動画2)。詳細な構造は今後の国際的なロボット学会で発表できたらいいなと思っています。また、人とロボットの共存を目指す中で、人が安心感を持つロボットのデザインを追求し、竹灯籠をモチーフにロボットアームをデザインしました。素材は社内の素材を開発している部署と連携し、「安心感」を感じていただけるよう木の構造物で設計しました。
-

- 図2 IROS2022の展示ブースの様子
- 動画2 床面と接触しながらカップを置くデモタスク
-今後はどのような研究を行う予定ですか?
- 奥松
- 今回はホワイトボード消しというタスクに挑戦しましたが、今後、新たな人と周囲環境と接触しながら行う家庭内のタスクについても学習ベースの制御を応用し、ロボットアームの可能なタスクを増やしたいと思っています。また、バックドライバビリティをより高くすることでロボットの安全性を高めたいと思っています。家庭内で人と一緒に働ける「人にやさしいロボット」の実現に向けて、より研究の進化に励みます。この記事に興味を持って、我々と一緒に新しいチャレンジをしてみようと思う方は下記よりコンタクトしてもらえると嬉しいです。
本件に関するお問い合わせ先
- 未来創生センター
- メールアドレスxr-probot@mail.toyota.co.jp




