2024年05月24日
空間知の研究~生命システムとしてのセル生産システムへの応用~

トヨタ自動車株式会社(以下、トヨタ)未来創生センターでは、未来へつながる研究の一つとして、空間内でのヒトやモノの動きや情報の流れを事象(イベント)としてとらえ、事象を見える化し、将来の動きや流れを予測する研究、すなわち「空間知研究」に取り組んでいます。現在は、車両試作工場にて空間知研究内容を適用し、その有効性を検証しつつ、家庭、病院、物流倉庫などの施設内、さらには、まちの中で活用できる技術に空間知研究を進化させようと挑戦しています。その取り組み内容についてメンバーの吉澤にヒアリングしました。
可動性を社会の可能性に変える
-本題に入る前にまず空間知研究について教えてください。空間知研究を日常生活の中で考えると、どのようなことでしょうか。
- 吉澤
- 日常のさまざまな場所で起こる個人個人の出来事をたくさん集めれば、何か見えてくることがあります。たとえば、車両搭載機DCMを通じて車両から収集されたデータにもとに交通情報を作成するトヨタの通れた道マップ*1は、空間知研究の概念の一例かと思います。普段通りとは異なる事象を見つけ、それを将来の予測に活用できれば、ヒトや社会がもっとWell-beingになる可能性が広がるのではないかと考えています。
-なるほど、今回の研究内容はクルマを作っている現場でのヒトやモノの動きを事象としてとらえて、現場で何が起こっているのかを俯瞰的に見える化し、今後の動きを予測する空間知研究なんですね。
- 吉澤
- はい、そうです。いきなり日常の複雑な生活に着手するのではなく、クルマをフレキシブルに作るセル生産の現場*2*3にて空間知研究を鍛えることにしました。
-クルマを作るセル生産システムと空間知研究は、どのようにつながるのでしょうか?
- 吉澤
- セル生産システムとは、一人または少人数の作業員がセル(Cell、細胞)と呼ばれるラインで製品の生産工程を完了する方式です。部品や工具をU字型などに配置し、作業者が動きながらモノを組み立て、製品を完成させます(図1)。多品種少量生産に対応しやすく、当社ではGRファクトリーなどで採用されています。
-
-
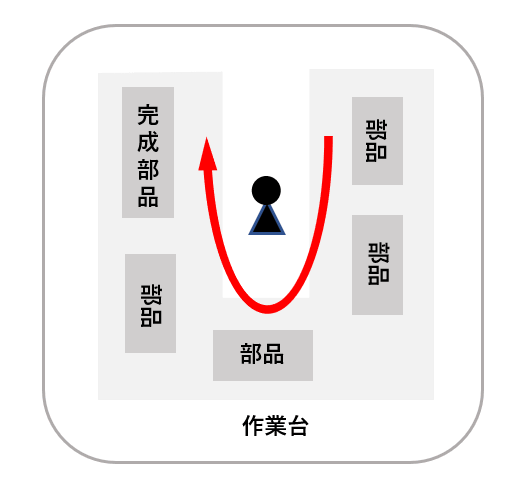
- 図1 一般的なセル生産システム(U字型)
-
-
-
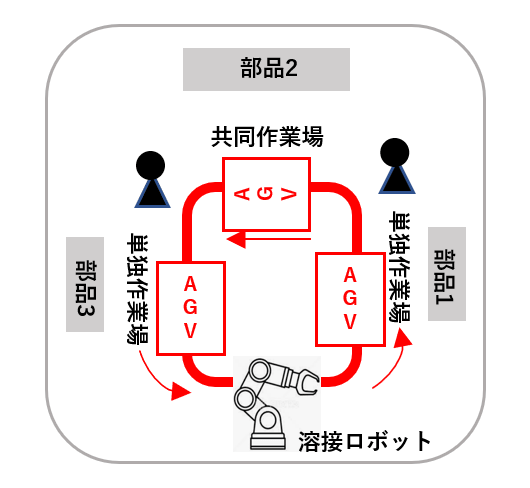
- 図2 車両試作工場のセル生産システム
-
-車両試作工場のセル生産システムもU字型になっているのでしょうか?
- 吉澤
- 車両試作工場のセル生産システムは、図2のようにメインの部品がAGV(Automatic Guided Vehicle、無人搬送車)に乗って各作業場所を巡回し、作業者がサブの部品を取り付けたり、溶接ロボットが溶接したりします。
-セル生産システムの現場での具体的な課題は、何でしょうか?
- 吉澤
- 通常のライン生産と比べるとセル生産システムでは、作業者が長いタクトタイム(製造にかける時間)で、多くの作業を手際よくこなす必要があります。もしも、AGVの所定場所への到着タイミングや、共同作業者との共同作業タイミングが合わないと、作業者の手待ち状態が起こります。ライン生産のカイゼンを行う際、作業者一人ひとりの作業時間をストップウォッチで計測し、生産サイクルタイムの予測やムダムラムリがないか見える化するのですが、セル生産システムの場合、セル内において同時に複数の事象が起こるため、作業の遅れや手待ちの原因を定量的に把握しにくいといった課題があります。またセル生産は作業者が複数の作業を担当するため、作業者に高いスキルが必要となり、共同作業者間のスキルバランスも重要な課題となります。今回は同時に起こる複数の事象に起因する課題を中心に、空間知研究で取り組んだ事例をご紹介します。
コラム
トヨタ生産システムをベースにしたセル生産システムは40年以上前から検討されている。トヨタのセルとは、「ある程度の自由度と自律能力を持って、ある一定範囲の工程系列を自己完結的に担当する、生産主体としての作業者と生産設備の集合」であり、セル生産システムは、「そのような複数のセルが連携しあって構成する生産システム」である。生産システムの自律化とは、「生産主体が、自ら行うマネジメント・コントロールの範囲を拡大すること」とされている*2。
-同時に起こる複数の事象に起因する課題を解決するために、どのように進めていったのでしょうか。
- 吉澤
- まず、デジタルツインのダブルループという基本コンセプトをもとに、実際の分析方法を考えました。
-
- 図3 デジタルツインのダブルループ
-デジタルツインというと、デジタル上の改善をリアルの現場に反映させる、双方向型を想像しますが、そのダブルループとは、具体的にはどういうことでしょうか?
- 吉澤
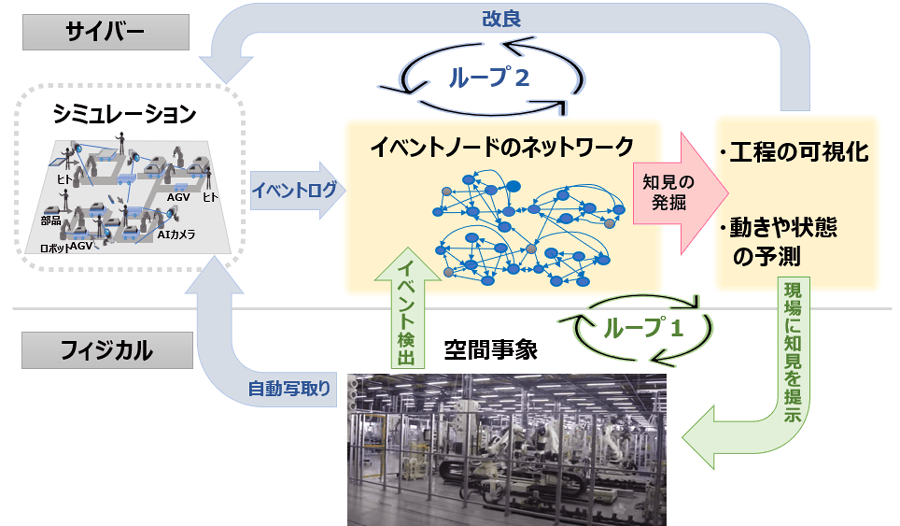
図3をご覧ください。まずフィジカルな現場に対して、サイバー内に現場を再現(以下、写し取り)します。そして複雑なプロセスを俯瞰的に把握するために「イベントノードのネットワーク」を導入します。
ダブルループのうち、まず第1のループ(図3の緑色の矢印の巡回)は、フィジカルな空間において、セル内で起こる事象を複数の天井カメラで検出し、イベントノードのネットワークを作成します。このネットワークから知見(遅れの事実や原因など)を発掘し、現場にそれを提示するループです。
第2のループ(図3の青色の矢印の巡回)は、現場の形状や動きをサイバー空間に写し取り、現場の動きをシミュレーションします。シミュレーションでイベントログが生成できるので、これらからイベントノードのネットワークを作成し知見を発掘し、シミュレーションに戻します。またサイバー空間で得られた知見も現場に提示するループです。
-イベントノードのネットワークが、二つのループのハブとなっているんですね。図3を眺めているだけでもいろいろな技術チャレンジがあったと思います。
- 吉澤
そうですね。実は自動でイベントノードのネットワークを生成するのも、ネットワークを分析してそこからどう知見を発掘するか、また発掘した知見をどう見える化し現場やシミュレーションに戻すかなど、すべてがチャレンジでしたし、それらが私たちの空間知研究の特長でもあります。
今回はいろいろなチャレンジや工夫の中で、作業イベントの検出、シミュレーションに使う自動写し取り、知見の発掘の3つの事例を紹介します。
- 作業イベントの検出
-そもそも作業イベントの検出とは何でしょうか?
- 吉澤
- 作業者やAGVがどの作業を実施しているのか、どんな状態にあるかを検出することです。再び図2をご覧ください。セル生産システムにおいて、たとえば、AGVが作業者の前に到着すると、作業者はAGVを作業台代わりにして溶接する部品をセットしたり、溶接された部品を次の工程に流す準備をしたりします。つまり、作業者とAGVが所定の位置で所定の時間一緒にいれば、そこで所定の作業が実施されたということになります。つまり、セル内でどの作業が実施されているのかを把握するには、作業者やAGVの動き(場所、時刻)が検出できれば良いのです。
-具体的に作業者とAGVの動きから、どうやって作業イベントを検出するのでしょうか?
- 吉澤
- まず作業者とAGVのバウンディングボックス(画像の中の対象を囲んだ部分領域、以下BBと略記)を決めます。作業者とAGVをカメラで検出し、作業者のBBとAGVのBBが所定の作業を行うのに十分な時間重なったら、所定の作業が発生したと考えます(図4)。
-
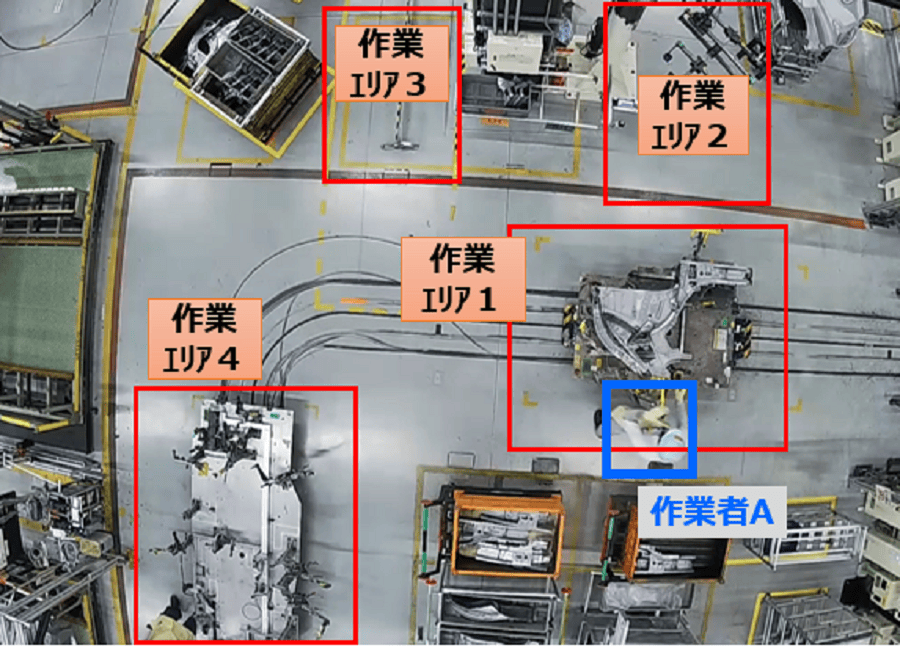
- 図4 車両試作工場における、イベント検出事例
たとえばAGVが作業エリア1に到着し、かつ、AGVのBB(赤色の枠)と作業者AのBB(青色の枠)が所定の時間重なっていたら、作業エリア1の作業が発生したと考える
作業場所はあらかじめ決まっているので、作業場所にS11~S29(単独作業)、K1~K3(共同作業)と名前を付け、カメラで検出した作業者とAGVの動きをガントチャート(縦軸 : 作業場所、横軸 : 秒)に表示し、見える化しました(図5)。
-
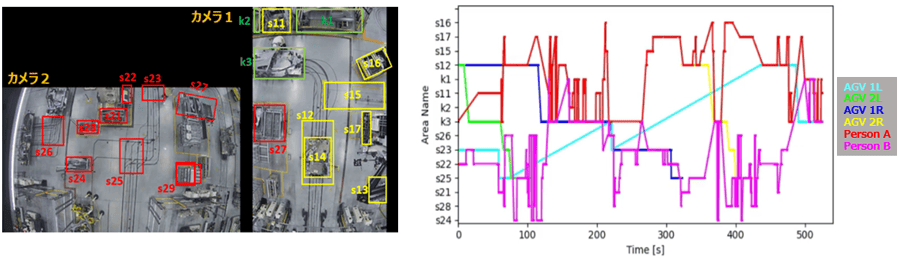
- 図5 車両試作工場におけるガントチャート
本ガントチャートは正常な動きを提示している。各サイクルでガントチャートを作成することで、異常が起こった場合、どの部分で異常が起きたのかがわかりやすい
-なるほど、セル内で同時に起こっている作業者やAGVの動きが見える化され、作業者の複雑な動きから負荷がかかっているのかがわかりますね。
- 現場の自動写し取り
-図6左の写真は複数のカメラで現場を撮影している結果ですね。S27はカメラ1とカメラ2でも撮影されていますが、画像が重なっている部分のAGVや作業者の動きがわかりにくそうですね。
- 吉澤
はい。私たちは複数のカメラの画像を貼り合せる研究にも取り組んでいます。この研究はイメージスティッチング(画像の縫い合せ)と呼ばれているホットな研究分野でもあります。今回の車両試作工場の天井カメラは真下を見る様に配置されていますが、真下でない場合、つまりひずみのある複数のカメラの画像からでも一枚のゆがみの少ない画像にスティッチングする技術にも取り組んでいます。
スティッチングした現場の映像と、前述のガントチャートを一緒に見れば、現場で何が起こっているかが一連の流れとして一目でわかり、かつ、定量的にも現場を把握できます。
-
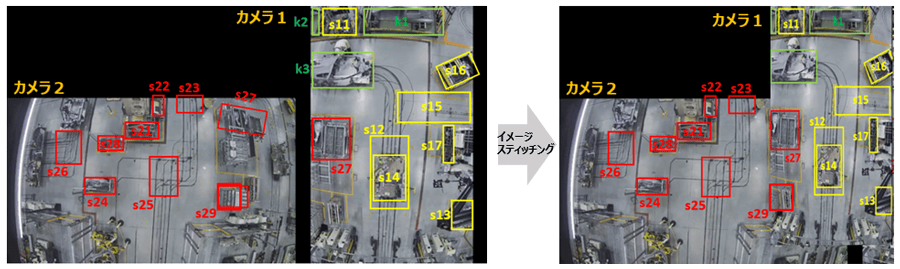
- 図6 イメージスティッチング
- 知見の発掘
-そして最後が知見の発掘ですね。イベントノードのネットワークからどうやって知見を発掘するのでしょうか?
- 吉澤
- イベントのログを収集し、そのイベントログをもとに知見を抽出することで、実際のプロセスを発掘モニタリングし、改善する分析手法*4で「プロセスマイニング」というものがあります。実は、欧米ではプロセスマイニングの研究が進んでいることを数年前に知りました。
-今回のセル生産システムには、どのようにプロセスマイニングを活用し、知見の発掘につなげたのでしょうか。
- 吉澤
- 二つの活用事例を紹介します。一つ目はイベントログからイベントノードのネットワークを作成する際にプロセスマイニングを活用しました。図7右をご覧ください。イベントログから作業者とAGVの事象をすべて書き出します(ノード、青色)。ネットワークの表示では、ノードの事象が起こる順番がわかるのですが、いつ起こるのかがわかりません。そこでノードの事象が起こる時刻を可視化するために、ネットワーク上を滑らかに動く黄色の玉をプロセスマイニングの方法によって作成します。黄色い玉とノードと重なったときにノードの事象が起こったと理解することができます。黄色い玉がつぎつぎと青色のノード間を移動することで、実際の作業が進むようすがわかります(動画1)。
-
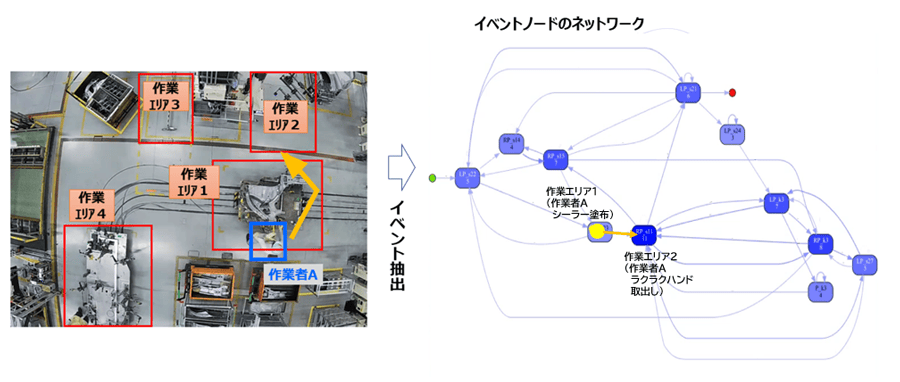
- 図7 車両試作工場における、イベントノードのネットワーク
- 動画1 イベントログ
-黄色い玉をクルマと見なすと交通流のように見えますね。
- 吉澤
- はい、その通りです。イベントログからイベントノードのネットワークを作ると、流れに見立てられるので、たとえば既存の交通流の解析が活用でき、流れの分析により知見が発掘できます。さらに、このネットワークの分析から作業者ごとの作業の負荷、作業者の手待ち時間の活用の仕方なども見える化できます。実は分析次第では共同作業者のスキルバランスもわかります。
-二つ目の活用について教えてください。
- 吉澤
- 実は、今紹介したプロセスマイニングは、空間的な情報が十分活かされていませんでした。そこで、私たちはイベントノードに空間的な座標の情報を導入することで、分析対象を空間的にも絞りこめるようにしました。私たちはこの手法を「空間的プロセスマイニング」と命名し、研究を進めています(図8)。
-
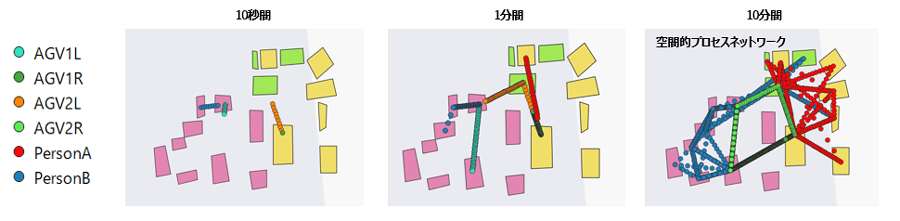
- 図8 車両試作工場における、空間的プロセスネットワーク
黄色のエリアはPerson Aの、ピンク色のエリアはPerson Bの単独作業エリア。黄緑色のエリアはPerson AとPerson Bの共同作業エリア。Person A、Person B、AGV1Rの各時間内の動きがわかる
-空間的プロセスマイニングで、現場の動きが見える化できましたが、そこからどう知見を発掘するのでしょうか。
- 吉澤
- セル生産システムの場合、イベントノードのネットワークは複雑になりがちですが、一連の工程をネットワークで表現することを繰り返すと、ネットワークの変化が激しい部分とそうでない部分が見えてきます。変化が少ない部分を基準にすれば、新たな知見が発掘できると考えています。
今後について
-今回、セル生産システムの工程の見える化を実施しましたが、そこから出てくる課題を人工知能(AI)で解決しようという取り組みはあるのでしょうか?
- 吉澤
- 近年、汎用的なAIが急速に発展していますが、ヒトと機械が協働する生産現場では、AIで解決するにはまだ難しい課題が多いと考えています。そこで私たちは、空間知研究を活かし、ヒトを主体とする柔軟性に富んだ生命のようなシステムの実現を目指したいと思います。
-冒頭で細胞という言葉や、今、生命という言葉がでてきましたが、まるで空間知研究が生き物のようですね。今後の意気込みについてお聞かせください。
- 吉澤
- 『はたらく細胞』という体内細胞が擬人化された漫画があります。セル生産システムは、その生命の仕組みと同じとは言えませんが、セル生産システムの中に生命システムの特長でもある変化への柔軟な対応や、しなやかな自律的統合体を感じながら、モビリティ社会のヒントを模索し、研究に取り組んでいきたいと思っています。検出すべきイベントの粒度はいろいろあるはずで、見るべき時間や空間の解像度もそれにあわせて変化させるような空間、時間情報のマルチスケール化にも挑戦して行きたいと思います。
-
- 図9 空間知研究メンバー
著者は前列左から2番目
著者
吉澤 真太郎(よしざわ しんたろう)
未来創生センター R-フロンティア部 空間認知ロボティクスグループ
参考資料
| *1 | 通れた道マップ |
|---|---|
| *2 | 信夫千佳子(2017)『セル生産システムの自律化と統合化-トヨタの開発試作工場の試み-』文眞堂 |
| *3 | GR FACTORY Virtual TOUR - バーチャル工場見学 |
| *4 | ウィル・ファン・デル・アールスト(Wil van der Aalst)著、プロセスマイニングData Science in Action、翻訳出版 2019 インプレス |
本件に関するお問い合わせ先
未来創生センター
- メールアドレス
- frc_pr@mail.toyota.co.jp