2023年10月10日
モビリティを支える道路インフラ。路上センシングの開発~道路上にいるすべての人とモノの居場所がわかる魔法の地図を作りたい~

トヨタ自動車株式会社は、これまでプリウス、クラウンといったクルマを製品として販売してきました。しかし、これからのクルマは情報・エネルギーなど社会インフラと一体化したものに変わり始め、特に自動運転車や高度運転支援技術はインフラとセットで考えていく必要があります。
そこで、トヨタ自動車 未来創生センター(以下、トヨタ)では、クルマが社会インフラの一部となることによって生み出される可能性に着目し、クルマが自動運転に変わったとき、道路はどうあって欲しいのか?を考えるプロジェクトを立ち上げました。
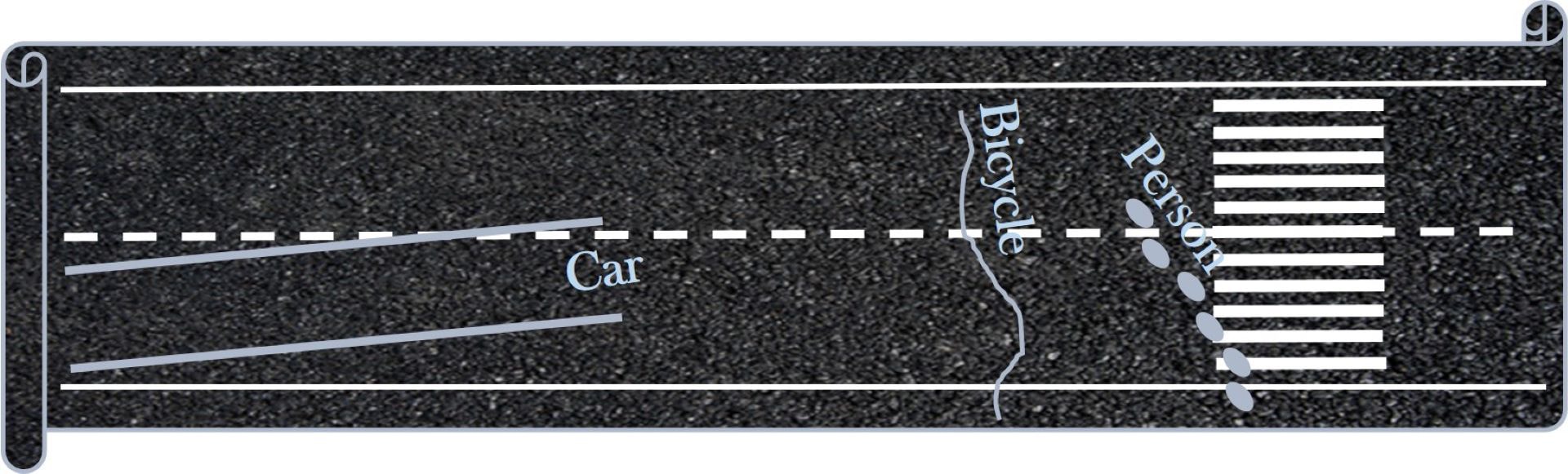
一般に、見通しの悪い場所や物陰からの歩行者や自転車の飛び出しに対して、車両単体での検知は難しいと言われています(図1)。そこで、歩道や脇道も含めて、道路上にいるすべての人とモノの居場所が分かる、そう「ハリーポッターの忍びの地図」のような道路を作りたいと、研究テーマに取り上げました。
この活動はトヨタだけでは実現できないテーマであるため、道路会社、建設会社、大学の先生方と一緒に取り組みました。本レポートを読まれた方の中から、トヨタでこんなことが出来るのか、一緒にやりたいな、と新しい仲間が手を挙げていただけたら嬉しいです。それではご紹介します。
-

- 図1 自動運転車が走る風景
なぜ道路から直接センシングしたいのか
-飛び出してくる歩行者を把握したいということですが、どうして監視カメラを設置するのでなく、道路から直接センシングしようと考えたのですか?
- 鷹羽
- 最初は監視カメラを使いました。やってみて分かったことは、道路沿いには停まっているクルマや街路樹の背後などカメラに映らない物陰がたくさんあるということです。クルマが停車している場所は日々変わりますし、街路樹も季節によって形状が変わります。物陰の位置や大きさが変化するため、カメラでは隠れている歩行者を追い切れないのです。ならば道路にセンサーを入れて直接検知してみようということでこの方法を考えました。
-自動ドアのように人が道路を踏んだら分かるのですね。道路はダンプカーとかも走るので頑丈にできていますが、人が踏んでも分かるセンサーはどのようなものですか?
- 鷹羽
- 光ファイバーです。それを道路の中に埋め込んでみました。元々、光ファイバーは橋やトンネルといった構造物のたわみを計測し、経年劣化を診断するセンサーとして利用されてきました。道路のような何km、何10kmといった長い距離をひとつの計測器で測定できるので、カメラと比較しても桁違いに安価な計測方法です。ただ道路は人が踏んだくらいでたわむのか?たわんだとしてもノイズに埋もれるくらい小さな計測値であれば使えないなと我々も半信半疑でした。そこで味見実験をしてみました(図2)。
-

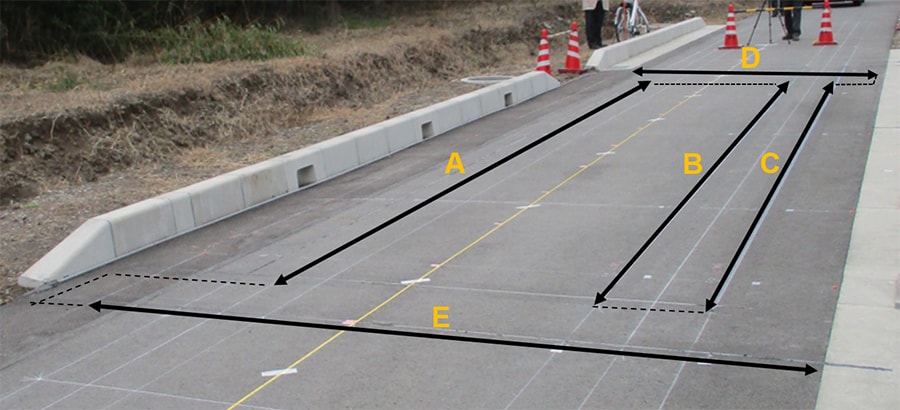
- 図2 道路に埋めた光ファイバーでの味見実験
試験道路に一筆書きで切り欠いた溝に1本の光ファイバーを埋め込みます。道路上に物体が通ることで道路がたわみ、それが光ファイバーのひずみとして計測できます。計測区間A-Eでは、物体からの距離、光ファイバーの埋設深さを変えて計測ができるので、荷重と道路のたわみの関係が推定できます。
-味見実験では道路に埋めた光ファイバーは人を捕えることができましたか?
- 鷹羽
- 図3をご覧ください。横軸が道路測定位置、縦軸が時間ですが、人の足跡が移動していく様子をしっかりと捕えています。道路から人をセンシングできる可能性ありと分り、味見実験は成功しました。
-
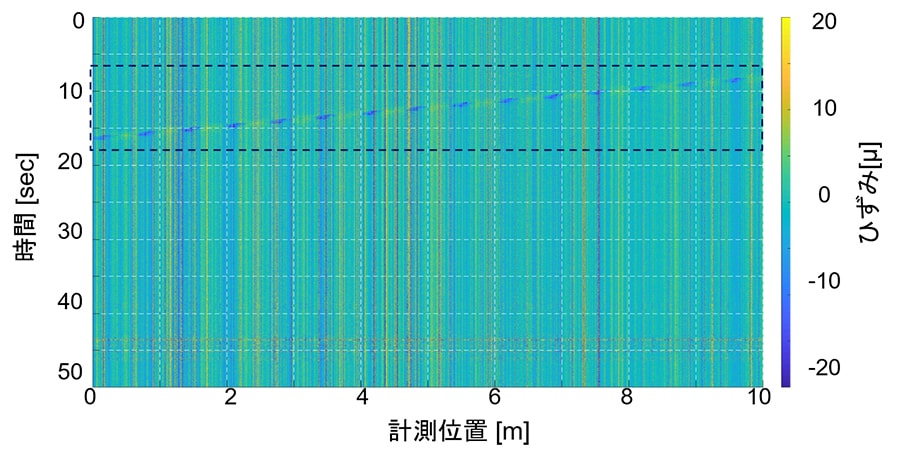
- 図3 味見実験結果
道路から見た人の足跡。道路右端から左端へ移動しているのが確認できました。
ソフトウェアファーストのものづくり
-道路インフラの研究は、ひとつの実験も大掛かりで大変ですね。
- 鷹羽
- 味見実験はn=1の特定の条件での結果ですが、実際の道路状況は材料、季節などによって大きなバラつきが生じます。インフラ設計を全てリアルで検討するのは無理ですので、シミュレーションを使いたいと考えました。舗装道路をモデル化できれば、センサーの配置やセンシングに適した道路について検討できるようになります。
-実際にどのようにして舗装のモデル化を行ったのでしょうか。
- 鷹羽
- 道路を模擬したテストピースを作ります。そこに分銅(おもり)を載せて舗装のたわみを測定します。このような基礎実験を、舗装材料を変えて繰り返すことで材料物性応じた舗装モデルを作りました。実験は舗装工事のトップメーカー株式会社NIPPO(以下、NIPPO)の技術研究所が支援してくれました。皆さん面白そうにしていましたよ(図4)。
-
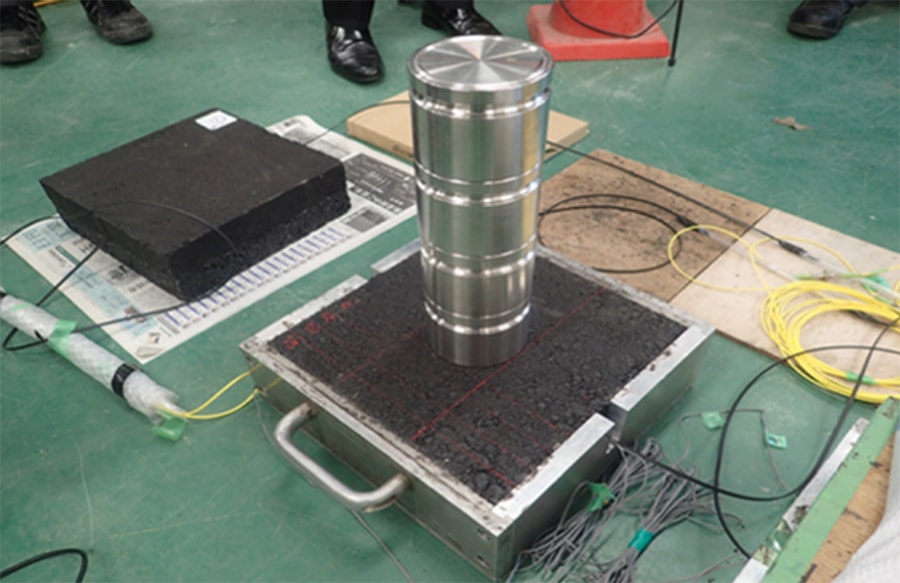
- 図4 舗装道路を模したテストピースの載荷実験
-モデル化は上手くできましたか?
- 鷹羽
- はい。でも実は大苦戦しました(笑)。舗装材料はアスファルト、石および砂を混ぜた合材です。また舗装材料は分銅を外しても完全に元の形戻らない、つまり弾性体でないので、モデル化するために、材料、地盤、構造解析など多様な専門技術と仲間が必要でした。そこで東京都市大学の関屋先生、カリフォルニア大学バークレー校の曽我先生にご指導をお願いし、物性値の取り方、弾性体でないものを弾性体のように扱う条件の検討など、高度なテクニックを駆使して舗装モデル化を実現いただきました(図5)。実験とモデル修正を繰り返す地道な作業でしたが、リアルとバーチャルな世界の間にある大きなギャップを埋めるのに避けて通れない工程です。
-
- 図5 アスファルト舗装のモデル化
-多様な技術を持った方が集まったのですね。モデルの精度はどうでしたか?
- 鷹羽
- 今回作成したモデルで実際の道路内部のひずみ分布をシミュレーションしてみると、舗装の表面よりも少し深い位置で、より大きなひずみが生じるという特徴的な結果が出ました(図6)。本当にそんなことが起きるのかと確認実験してみると、シミュレーションどおりの結果を得られ、モデルが実用精度を持つことが確認できました(図7)。
-
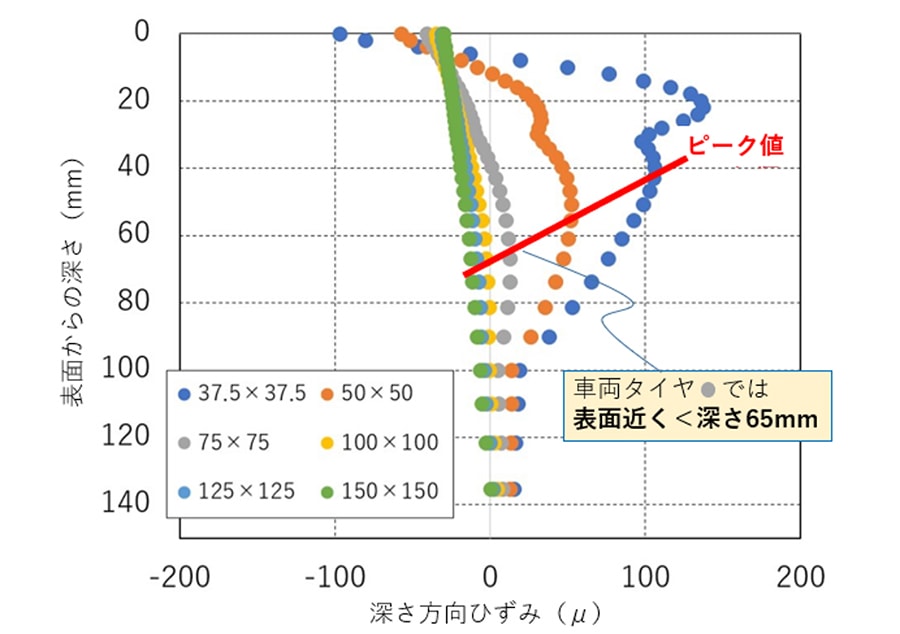
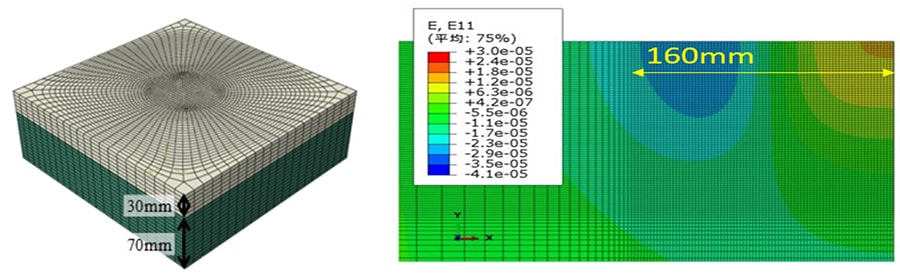
- 図6 アスファルト舗装のひずみシミュレーション
舗装への加圧部の面積を変えて、内部ひずみの状況を解析してみた結果。
表面よりも少し深い位置(車両タイヤの場合深さ65mm)にピーク出現。
-
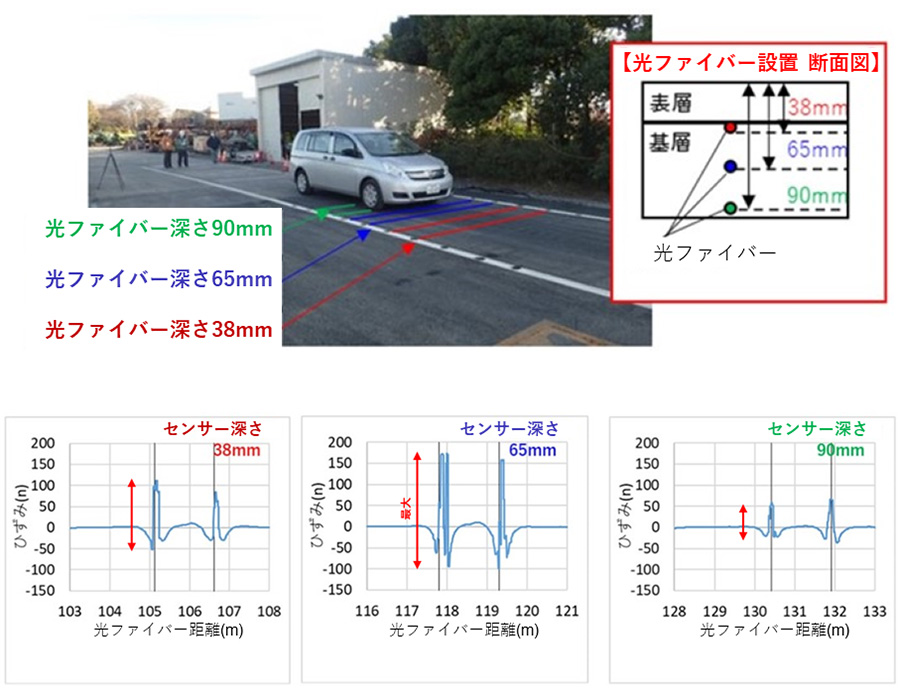
- 図7 モデルの確認実験
表層近くより少し深い位置で変形ピーク出現し、モデル解析と実測値が一致。
モデルが実用精度を有することが確認できた。
-これで色々なシミュレーションができるようになり、自動運転の実現にまた一歩近づくことができそうですね。
- 鷹羽
- はい。さらにシミュレーションで、人をセンシングする場合のセンサー配置など検討し、その内容を学術誌*1にも投稿したところ、「トヨタはこんなことをしたいのか、うちも手伝うよ」といった声をいただき、新しい技術と仲間を迎えて研究は次のフェーズに進みました。
さらなる新しい技術との融合
-新しい技術や仲間はどのような方だったのですか?
- 鷹羽
- 鹿島建設株式会社(以下、鹿島建設)です。元々自社で施工した橋やトンネルの構造モニタリングに光ファイバーを使っていて、専用計器を作るくらい計測技術に長けていらっしゃいます。
-新しい技術がチームに与えた影響はいかがでしたか?
- 鷹羽
- 鹿島建設の参加により、計測データを使って路上にいるモノの居場所を可視化することができるようになりました。図8をご覧ください。人が道路の右から左にV字型に移動する様子を確認できます。また新しい技術領域として、計測されたデータをAI機械学習に掛けて、路上に人がいるかを判別することなど、計測と画像認識の融合も始まっています。機械学習と相性の良い技術領域に進化したことで、開発も加速しています。鹿島建設が加わった新しい共同研究については鹿島建設プレスリリースも合わせてご覧ください。

-
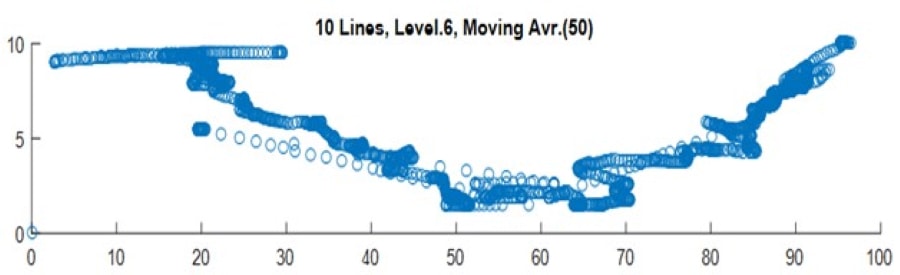
- 図8 実験場をV字型に歩行した際のデータで歩行者位置を推定
光ファイバーセンサーで歩行者の居場所がわかるようになった。
今後の展望について
-最後に今後の展望についてお聞かせください。
- 鷹羽
- 今回新しい技術「光ファイバーを使った路上センシング」について、新しい仲間と一緒に実験、モデル化、データ解析を実施し、技術を進化させることができました。今後チャレンジしたいことは、AI機械学習を活用し、複数の人やクルマがいる場合でも、路上にいるものが何なのか判定し、それらの数秒後の行動を予測し、潜んでいる危険を早期発見できたらと思っています。また、この技術を実際の道路に設置し、長期間データ取得し、実用化に向けた機器仕様、施工技術なども合わせて見直していきたいです。さらにこの技術は交通事故防止に限定されず多様な活用方法が考えられます。このレポートを機に、新しい用途、場面について仲間づくりの輪が拡がっていけばと期待しています。

-

- プロジェクトメンバー
上段左より、樋口正裕さん*2、吉中保さん*2、鍛冶哲理さん*2、関屋英彦さん*3、曽我健一さん*4
下段左より、川端淳一さん*5、今井道男さん*5、永谷英基さん*5、鷹羽正三(筆者)
参考情報
| *1 | Identification of external load information using distributed optical fiber sensors embedded in an existing road pavement, Optical Fiber Technology vol.67 (Elsevier) |
|---|---|
| *2 | NIPPO |
| *3 | 東京都市大学 |
| *4 | カリフォルニア大学バークレー校 |
| *5 | 鹿島建設 |
著者
鷹羽 正三(たかば しょうぞう)
トヨタ自動車株式会社 R-フロンティア部 第1インフラシステムG 主幹
将来モビリティを支えるインフラ研究、水素製造プラントの設備計画など
研究開発と生産技術を兼務し、もっといいクルマ社会づくりに邁進。
本件に関するお問い合わせ先
- 未来創生センター
- メールアドレスfrc_pr@mail.toyota.co.jp




