
2024年08月29日
滞空性空中プラットフォームを目指す「マザーシッププロジェクト」第3弾~春一番が吹く福島の上空にて12時間以上連続滞空達成!~

トヨタ自動車には豊田佐吉遺訓をまとめた豊田綱領があり、その中に「研究と創造に心を致し 常に時流に先んずべし」という言葉があります。トヨタ自動車 未来創生センター(トヨタ)では、将来日本が抱えるであろう社会課題を想定し、資源の多くを輸入に頼っているわが国の将来のエネルギーセキュリティのために2018年「マザーシッププロジェクト」*1-4を立ち上げました。「マザーシッププロジェクト」とは凧(カイト)を対流圏界面域に飛ばし、空中プラットフォームとして偏西風を利用して発電したり、ほか世の中に役立つサービスを提供したりしようというプロジェクトです。このプロジェクトを実現させるために、我々は以下のように開発を進めてきました。
今回の第3弾では長時間連続滞空飛行し続けるために必要な電力を自家発電で補う「カイト上(オンボード)風力発電デバイス」の開発と、その有用性を確認した2024年2月の試験結果について紹介します。
空中プラットフォームとしてさらに長時間の滞空飛行性能獲得を目指して
マザーシップとして空中プラットフォームを実現するには、カイトを長時間安定滞空飛行させる性能が求められます。その方法として第2弾で紹介した姿勢制御には、スポイラーやコバートといった空力舵(図1)を動かすための電力が必要です。また夜間滞空飛行には、法規上カイトにも航空障害灯の点灯が必要になり、それらを点灯するためにも電力を必要とします。電力を地上から供給する方法として、凧糸(テザー)を導線化する方法がありますが、安全性を考慮するとテザーが大変重く、また太くなってしまうため現実的ではありません。そこで我々は長時間安定滞空飛行に必要な電力をカイト上で発電するデバイスを開発することにしました。
-
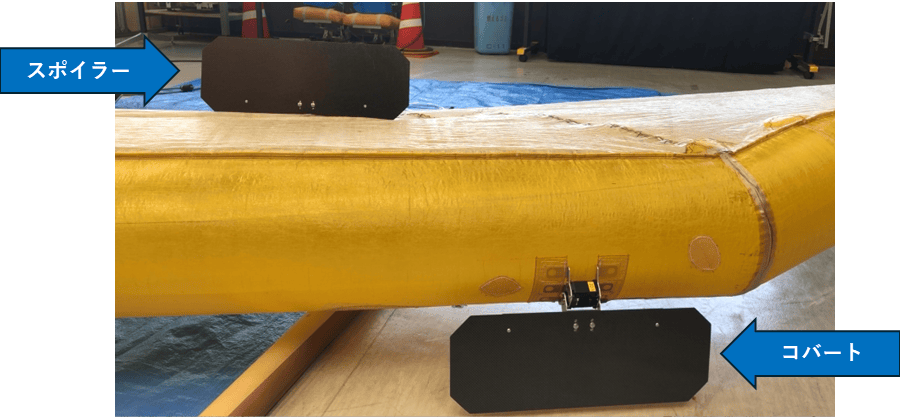
- 図1 空力舵構成。スポイラーやコバートを動かすためには電力が必要
必要な電力についてですが、マザーシップは対流圏界面域を滞空飛行しているため、昼夜問わず偏西風の強風を受けていますし、地上からテザーで引っ張られています。そのため、空力舵を稼働させる電力は無人航空機よりも必要だと推測しています。また、地上から浮上する際、極力重量を軽くしたいため、風力発電、太陽光パネルやバッテリーといった搭載物(ペイロード)は最小限としなければなりません。カイト上で発電するデバイスの候補としては太陽光パネルもあったのですが、現時点ではカイトの膜材に適した薄型の軽量太陽光パネルがなかったこともあり、我々は小型風力発電方式を選択しました。カイトは強風で荒れた風況時には、姿勢制御のために多くの電力を消費しますが、風力発電方式だと、そのような風況時は風力発電量が増えるので理にかなっていると思います。また、バッテリー残量を考慮し、制御頻度を増やすことで、電力マネージメントも可能です。風力発電のプロペラを大きくし発電量を増やせば、近い将来、カイト上に設置するペイロードに電力を供給することも可能だと考えています。
小型風力発電を設計する際、まず、過去の数々の条件での飛行試験データから姿勢制御での必要電力、航空障害灯の消費電力を算出し、この小型風力発電デバイスの必要性能を6.0Wから10Wに決めました。しかし、市販品ではこの必要性能を満たす風力発電の羽(ブレード)がなかったため、3Dプリンターで自ら成形し、風洞試験をしながら目標性能が出るか確認し、ブレード形状を改善していきました(図2)。ブレード断面を中空にして少し厚い翼型にするともっと空力性能が上がるのですが、成形に時間と費用がかかることから翼弦形状単板式を選択しました。そして飛行試験用に、より軽く、強くしたいこともあり、炭素繊維複合材料(CFRP)でブレードを成形することにしました。CFRPで成形した結果、ブレード単板厚を3.0mmから0.8mmへと大幅に薄くすることができました。(図3、図4)。
-
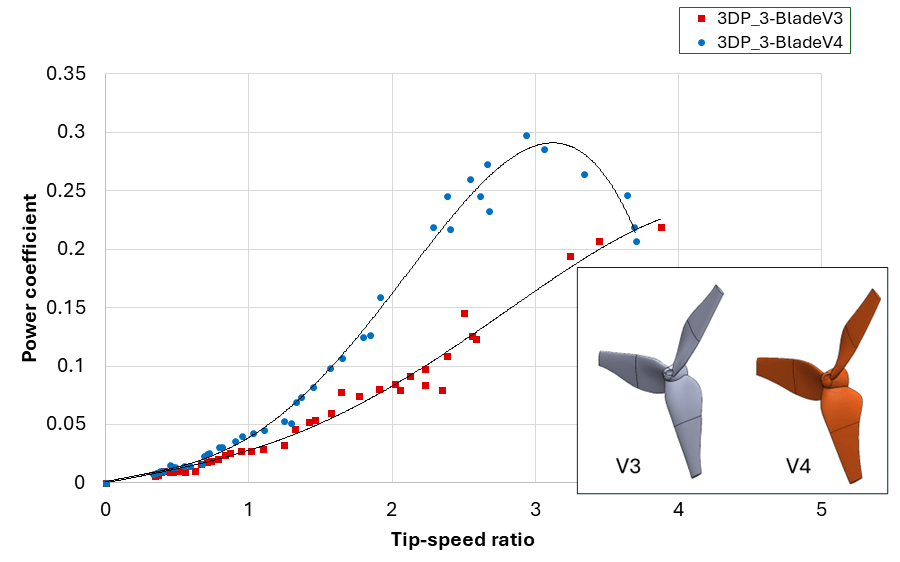
- 図2 3Dプリンターブレードの改善状況。ブレードの形状を変えることで発電量を向上。今回はふくしまスカイパークでの試験用に風速8.0m/sから20m/sで発電量が増える形状にしました。偏西風域用には、今後別の形状のブレードを作成します
-
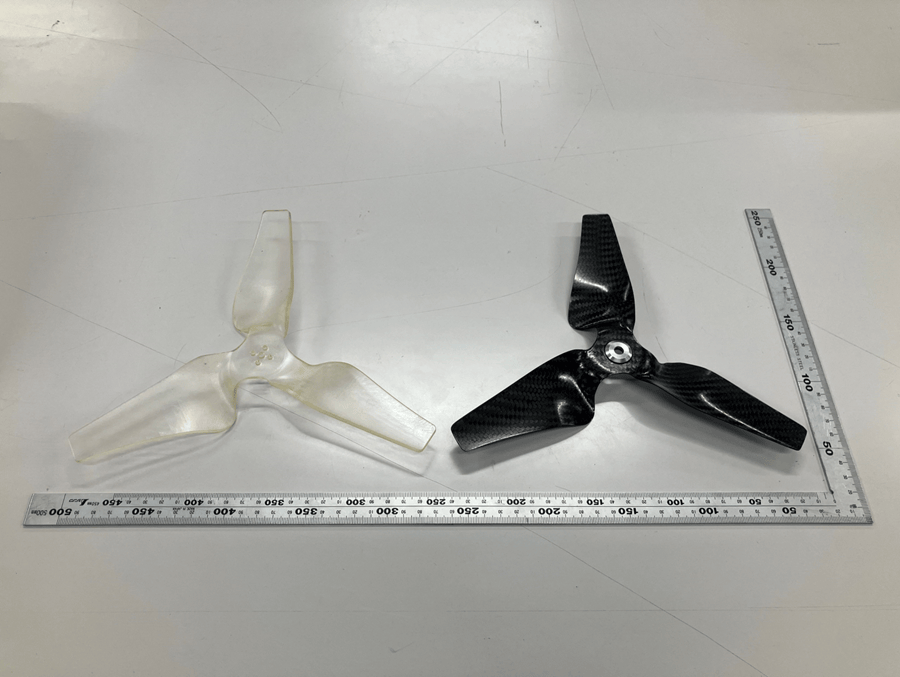
- 図3 3Dプリンター製ブレード(左)とトヨタ自動車元町工場車体部カーボン課製CFRPブレード(右)
-

- 図4 トヨタ自動車元町工場車体部カーボン課の皆さん。カーボン課はスポーツカーなどの空力パーツを製造。カーボン課の方がマザーシッププロジェクトに賛同し、短期間で風力発電ブレードを制作してくれました
風洞試験で風速8.0m/sから20m/s下において、小型風力発電デバイスにより発電し、空力舵を動かしてみたところ、要求性能を満たすことを確認できました(図5)。また、カイトに小型風力発電デバイスを搭載し、200m上空でテスト飛行したところ、十分発電することも確認できました(動画1)。
-
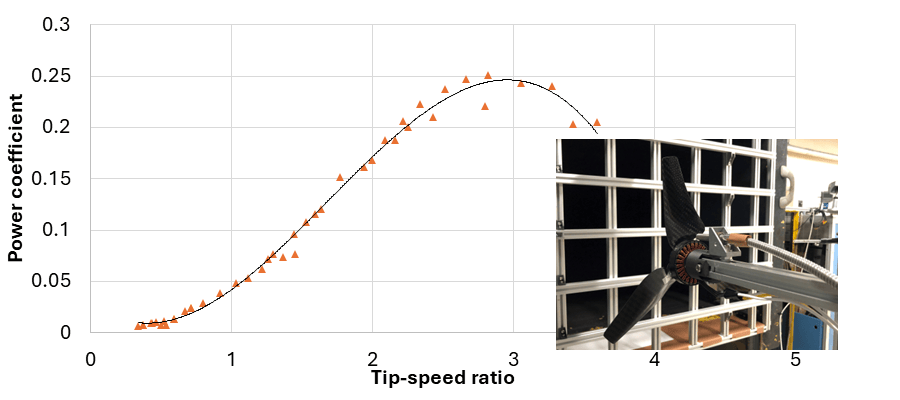
- 図5 風洞でのコンポーネント試験結果
- 動画1 カイトに搭載した発電デバイスの作動状況
『道場』福島での長時間滞空飛行にチャレンジ!
2023年3月に連続滞空飛行試験を実施した場所は夜間飛行ができない施設だったため、飛行時間が制限されていました。そこで、福島県の方に終日カイトの連続滞空飛行試験に使えそうな場所はないか相談した結果、「ふくしまスカイパーク(福島県福島市)」に決定しました。決定理由は、飛行に必要な設備が揃っていること、夜間や冬季は飛行場としては使用できないため、逆にその期間、我々が使用できるからです。次に、連続滞空飛行試験の実施時期ですが、施設の都合上、日程を実試験期間の約2ヶ月前に決める必要があります。そのため、実試験期間の天気や風況は選べません。除雪は、ふくしまスカイパークと福島市のご支援をいただけたこともあり、満を持して冬季の安定した強風が残る2月の中旬に試験期間を設定したのですが、当日は平年より1ヶ月早く『春一番』が到来し、福島でも猛烈な暴風雨に見舞われてしまいました。しかし、この暴風雨はカイトの性能を向上させたい我々にとっては好都合でした。
メンバーの安全を確保した上で、地上の風が安全基準に収まった瞬間に離陸(動画2)、強風、かつ、うねった風況の中を前回よりも姿勢制御を効かせながら、みるみるうちにカイトは上昇。高度600m付近で昼間は時折風速30m/sを超える極めて荒れた風況の中をしっかり姿勢安定制御が働き安定飛行を続けました(動画3)。
- 動画2 離陸と乱れた風の中のカイト急上昇
- 動画3 風速30m/sの中でも姿勢安定制御で飛行継続
約6時間が経過したころ夜間に突入し航空障害灯の点灯を開始、昼間に荒れた風況による想定以上の姿勢制御の介入回数でバッテリー残量が気になりましたが、今回開発導入した小型風力発電デバイスの効果でカイト上電力量もしっかり残っており、安心して夜間飛行を続けることができました(動画4)。
- 動画4 夜間飛行の様子(12時間経過)
しかし夜が深まるとだんだん風が収まり連続滞空飛行12時間を超えたところで上空1,000mまで全く風がなくなり、12時間26分で着地してしまいました。連続滞空飛行時間目標24時間に対してまだ半分程度ですが、プロジェクト上の滞空飛行時間での新記録を打ち立てることができました。また風速が30m/sを超えるような風況の中で姿勢制御技術で長時間滞空飛行し続けたという実績ができました。飛行体の中で、このような風況の中で飛行し続けることができるものは、我々が把握する限りありません。またそのような風況の中で風速(カイト上の風速計、図6)、高度(図7)、制御頻度(図8)、バッテリー電圧(図9)、そしてカイト姿勢の動画データを揃って取得できたことは、今後のカイトの技術改善に向けて大きな意味をもつことになります。例えば、小型風力発電デバイスは高風速域は申し分なく発電していますが、低風速域の発電開始タイミングを少し早めて、発電力を増やす改善をすれば夜間・低風速といった悪条件でも電力を供給できるということがわかりました。
-
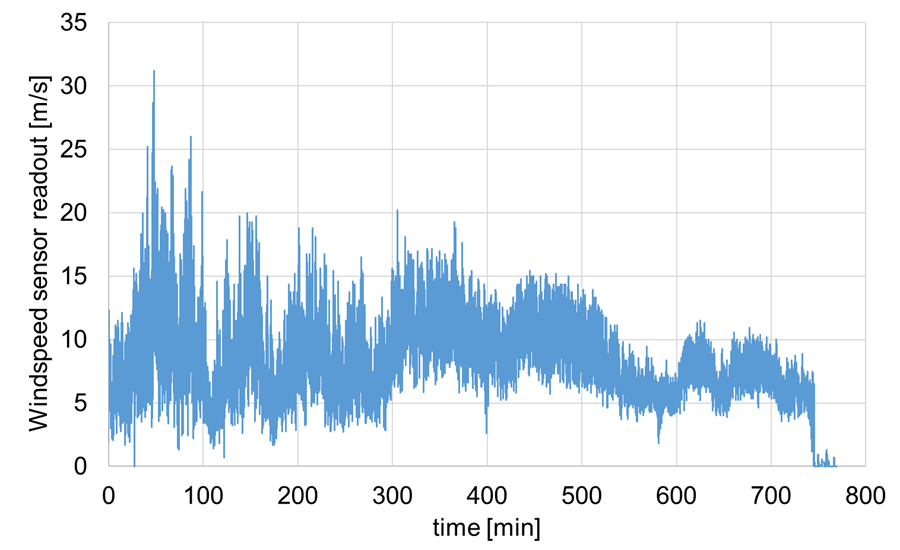
- 図6 カイト上の風速計による風速履歴
-
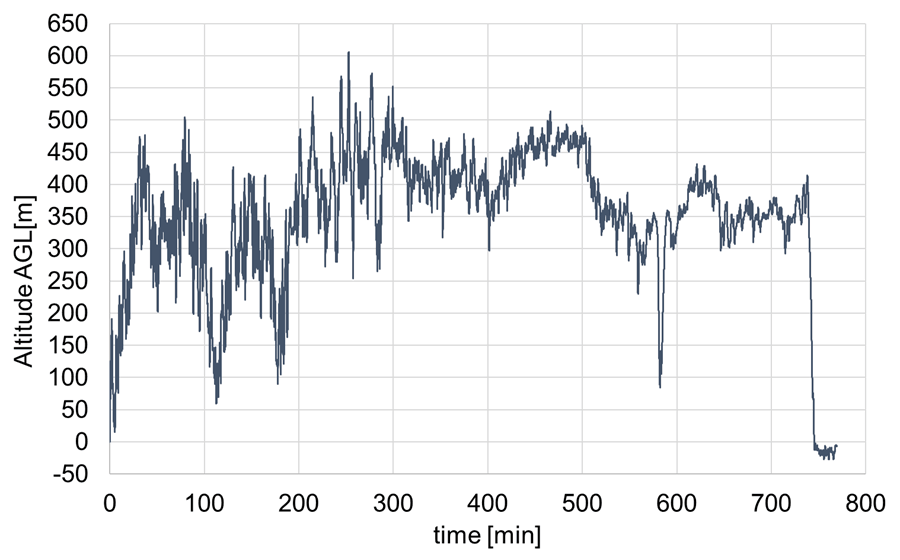
- 図7 カイト地上高度履歴。ふくしまスカイパークでの試験期間中に実施した予行試験でアクシデントがあり、準備していたテザー(2,000m)を1,300mに切らなければなりませんでした。そのためカイトの飛行高度は300mから600mでした
-
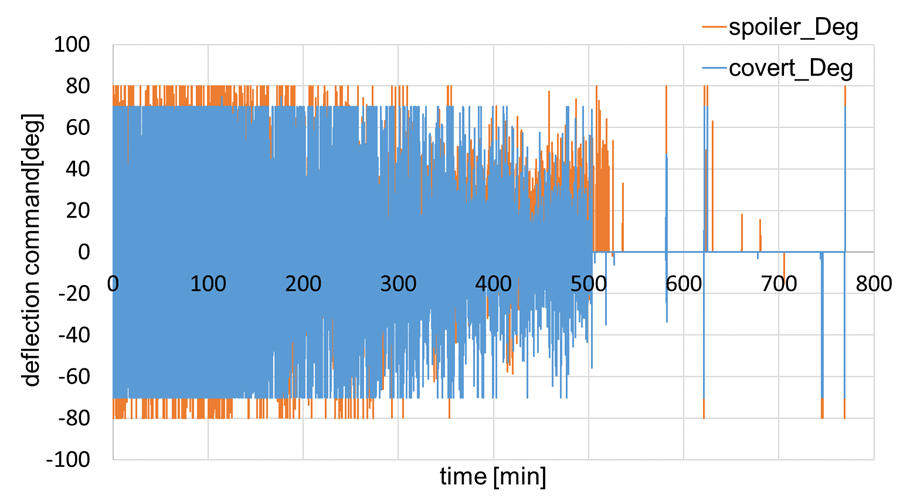
- 図8 姿勢制御による空力舵制御頻度履歴
-
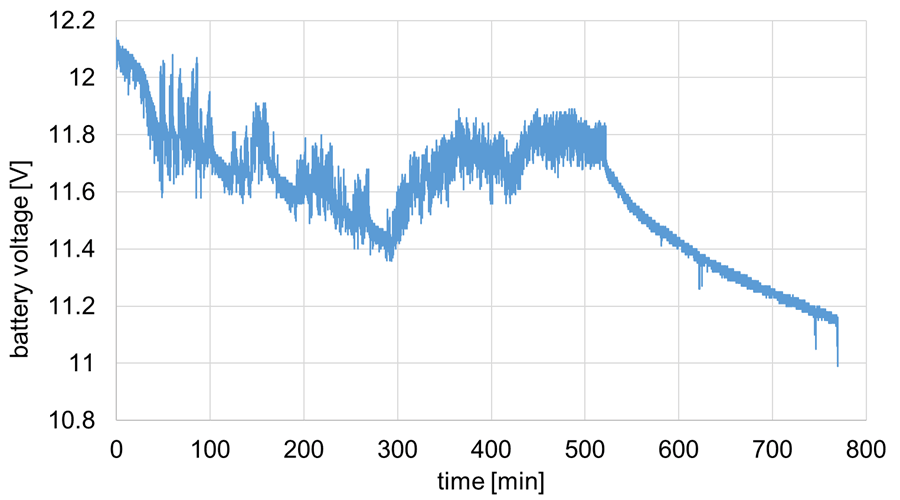
- 図9 カイト上バッテリー電圧履歴
これから
今回の長時間滞空飛行チャレンジで改めてわかったこととして、24時間以上の長時間飛行を目指すには、風況的により高高度の安定した強い風に到達する必要があります。そのために、現在、高度5,000m以上の飛行が可能なウィンチの開発を行っています。カイト自体については、今年8月に新しい設計を導入した試作を行います。そして今回の小型風力発電装置により、強風での姿勢制御技術や長時間飛行での電力マネージメントができるようになったので、今年の10月に偏西風の下端でもある高度5,000mと24時間連続滞空飛行を目指します。さらに、2025年2月には、より長時間となる8日間の連続滞空飛行を目標を目標とし、開発を進めています。マザーシップ最終ビジョン達成前ではありますが、カイトシステムを活用した気象*8や通信、小規模発電などの検討において、この高度と滞空飛行時間は自信をもって紹介できる実績なので、仲間づくりにもつながると思っています。
いつの日か「マザーシップ」の実現を夢見て、我々の挑戦は続いていきます。
こぼれ話 : AIAA SciTech 2024(米国航空宇宙学会による先進技術に関する最大の国際学会)にて発表してきました!
アメリカ航空宇宙学会(American Institute of Aeronautics and Astronautics、略称AIAA)が今年1月に米国フロリダ州で開催したAIAA SciTech 2024において、「Novel Concepts: Toyota Mothership, High Altitude Aerial Platform Project」という題目の1セッションをいただき、トヨタから3件、北米の研究機関Toyota Research Institute North America(TRINA)から2件、TRINAと共同研究を実施しているバージニア工科大から1件、発表しました。発表当日は、非常に多くの聴講者が集まり、多くの質問や問い合わせをいただき、世界中の研究者がマザーシッププロジェクトや日本のオンリーワン技術を生かした新基材に関心をもっていることを実感しました。特に、カイトの飛行姿勢制御開発において、まず現象把握の視点でつかみ仮説を立て、その後モデル解析で原理把握と対策案を講じ、同時に飛行試験で適合しながら対策案の効果を確認するという開発方法は、後日、航空関係者から多くの問い合わせがありました。その一部の方とは、新しい共同研究開始につながりました。今年のAIAA SciTech効果なのか、次回AIAA SciTech 2025では同題目で2セッション枠をいただけることになりました。トヨタ、TRINAを始め、共同研究でお世話になった大学や研究者ととも発表する予定です。さらに、自分でも驚いたのですが、私が同学会の空力のCFD(Computational Fluid Dynamics)のレビューアー(論文査読者)としてAIAAよりアサインされました。アサイン理由は、マザーシッププロジェクトの知名度と開発戦略、学術的成果だと伺い、40年以上航空工学に携わってきた身としてこの上ない賛辞だと思いました。
-

- 著者発表風景
-
- トヨタ、TRINA発表者メンバー
著者
板倉 英二
トヨタ自動車が、かつて航空機用エンジンの開発していた際の、型式・製造認証取得の中心メンバー。以降、将来モビリティ企画研究に従事。夢は「マザーシップ」を実現させること。マザーシッププロジェクトがいろいろな研究や技術の集合体であることから「今は日の目をあまり見ていない尖った研究や技術」のプラットフォームにもできないか考えています。関心がありましたら是非ご連絡ください。
参考文献
本件に関するお問い合わせ先
- 未来創生センター
- メールアドレスfrc_pr@mail.toyota.co.jp




