
さらなる燃費向上と、4WDでの高い操縦安定性、走破性を目指し、新しい4WDシステムを開発しました。
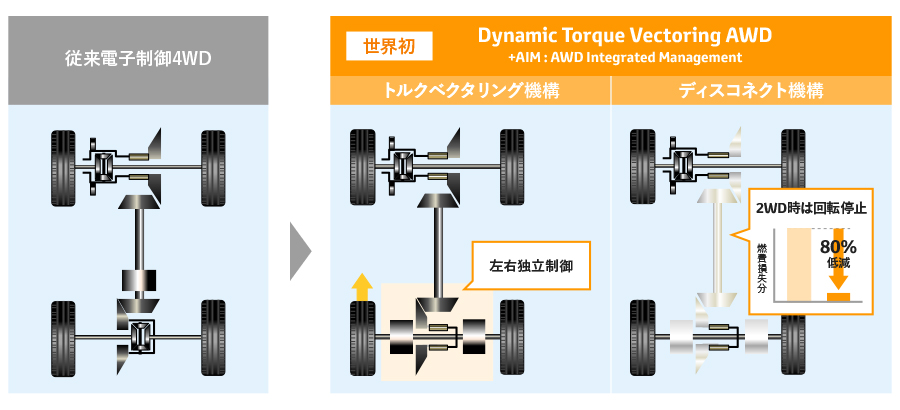
エンジン車に採用する新システム「Dynamic Torque Vectoring AWD(ダイナミックトルクベクタリングAWD)」では、走行状況に応じてリヤのトルクを左右独立で制御する「トルクベクタリング機構」を採用することで、ドライバーの思い通りの旋回性能と、高い悪路走破性を実現しました。また、前後輪の車輪軸に世界初*の「ラチェット式ドグクラッチ」を備えることで、2WD走行時には、後輪に動力を伝達させる駆動系の回転を停止させて損失を大幅に低減し、燃費向上をはかる「ディスコネクト機構」を採用しています。
ハイブリッド車に採用する「新型E-Four」においては、電気で駆動する後輪の全体トルクを従来型の1.3倍に増加させた上で、走行状態に応じて適切に後輪にトルクを配分する新制御を採り入れ、高い走破性と優れた操縦安定性を実現しました。
さらに、「Dynamic Torque Vectoring AWD(ダイナミックトルクベクタリングAWD)」、「新型E-Four」双方に、エンジン、トランスミッション、ブレーキ、4WDを統合して制御する「AWD Integrated Management(AIM)」を採用し、路面を問わない高い操縦安定性を確保しています。
| * | 2018年2月現在。トヨタ調べ。 |
|---|
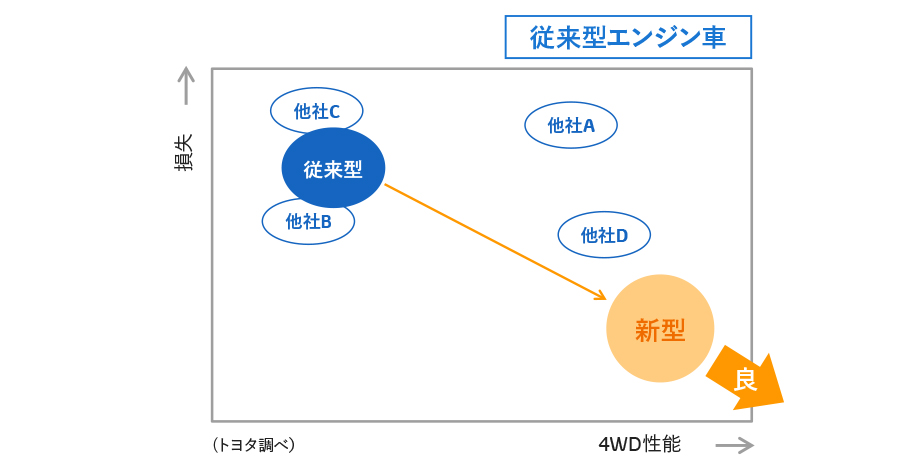
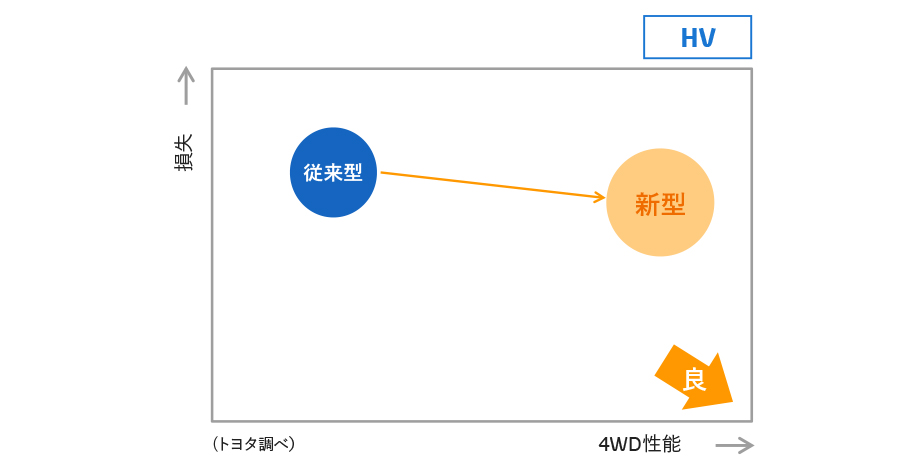
トヨタが目指す4WDの方向性(乗用車4WDの場合)
優れた走行性能と環境性能を両立しています。
新型4WDシステムのラインナップ
今後、乗用車用・商用車用・HV用など、さまざまな用途に8機種の新型4WDシステムを展開していきます。

新型4WDシステムの走行性能
オンロード、オフロードの基本性能を向上し、優れた走行性能を実現します。
新型4WDシステム(従来型エンジン車)
リヤのトルクを左右独立で自動制御する新機能と、自動で2WDに切替える機能を合わせ持つ新型4WDシステムを開発しました。
新型4WDシステム(HV)
リヤの出力トルクを大幅に増加させ、前後駆動力配分を自動最適制御する新型E-Fourを開発しました。

ダウンロード(動画)
-

- 新型無段変速機(CVT)
「Direct Shift-CVT」

-
- 新型直列4気筒2.0L直噴エンジン
「Dynamic Force Engine(2.0L)」

-

- 2.0Lトヨタハイブリッドシステム(THSⅡ)

-
- 新型4WDシステム
「Dynamic Torque Vectoring AWD(ダイナミックトルクベクタリングAWD)」
「新型E-Four」

ダウンロード(画像)
-
-

- 直列4気筒2.0L直噴ガソリンエンジン
「Dynamic Force Engine 2.0L」
-
-
-

- 直列4気筒2.0L直噴ガソリンエンジン
「Dynamic Force Engine 2.0L」
-
-
-

- 6速マニュアルトランスミッション
-
-
-

- 6速マニュアルトランスミッション
-
-
-

- 新型無段変速機(CVT)
「Direct Shift-CVT」
-
-
-

- 新型無段変速機(CVT)
「Direct Shift-CVT」
-
-
-

- トランスアクスル
-
-
-

- トランスアクスル
-
-
-

- ニッケル水素バッテリー
-
-
-

- ニッケル水素バッテリー
-
-
-

- パワーコントロールユニット(PCU)
-
-
-

- パワーコントロールユニット(PCU)
-
ダウンロード(PDF)
-

- 関連資料
-

- TNGAによる新型パワートレーン
関連コンテンツ






アクセスランキング




