2023年06月13日
ロボットが人に合わせる、人中心のフィジカルアシストの研究について

トヨタ自動車株式会社 未来創生センター(以下、トヨタ)と学校法人トヨタ学園 豊田工業大学(以下、豊田工大)では、人とロボットが協調作業をすることで人が心身ともに良好な状態になることを目指し「心と身体のアシスト制御技術」の基盤研究に共同で取り組んでいます。今回はロボットによる身体機能のアシストについて研究しているメンバー(山下、山口、山田)に話を伺いました。
-まずは、なぜ人の身体機能をアシストするロボットの研究を進めているのでしょうか?
- 山田
- 人は年齢を重ねるに従い、筋肉など身体機能が衰えてきます。いつまでも元気に活動するためには、歩行や作業に必要な身体機能を可能な限り維持することが重要です。高齢化社会では、身体機能の維持に向けた様々なニーズに応えられるよう、ロボットによる身体機能のアシストが今後重要になってくると考えています。このような分野では、すでに、人が装着するタイプのロボット(ウェアラブルロボット)や腕のようなタイプのロボット(マニピュレーター型ロボット)などの研究が行われています。
-人の身体機能をアシストするロボットによって可動性が広がる未来はワクワクしますね。こうしたロボットの実現に向けて、何が課題なのでしょうか?
- 山田
- たとえばウェアラブルロボットは装着している人の動作を妨げることなく、人の動作の意図に合わせて動くことが望まれます。しかし、ロボットが人の動作意図を間違って推定することや、人の動作に不適切な力を人に与えることが起こり、こうした場合人がロボットと力の押し合いをすることになるため、とても動きにくく動作に強い違和感を覚えるという課題がありました。さらにロボットの予期せぬ動作に対してどのように人への安全性を確保するのか、という課題もありました。そこで、私たちの研究ではこれらの基本的な課題を解決するための基盤技術として、①人の動作意図をくみ取る機能、②人の動作に合わせて適切なタイミングで適切な力を人に与える機能、③ロボットが出す力や速度を制限する機能の3つの設計方法を提案し、ウェアラブルロボットとマニピュレーター型ロボットの性能面でのうれしさを確認しました。
-それでは、①人の動作意図をくみ取る機能について、教えてください。装着している人がどのように動きたいのか、ロボットはどうやって知るのでしょうか?
- 山口
- ウェアラブルロボットを例にして説明します。ウェアラブルロボットが人の動作の意図を推定する方法として、ロボットにどのような命令をすると、どう動くのか、という数理モデルを作っておき、数理モデルで計算された動作と実際の動作が異なるのは、ロボットに人か周りの障害物が力を加えているのだ、と外部からの力を推定する方法(外乱オブザーバ)を使うことがあります。私たちは当初、外乱オブザーバを用いて人の動作意図の推定を試みましたが、適切な数理モデルが作ることが難しく、推定精度が低かったために、うまくウェアラブルロボットを操作することができませんでした。
-どのようにこの問題を解決したのですか?
- 山口
- 人の動作意図を前後の行動から推定できないかと考え、誤差の時系列学習に適したリザバーネットワークを外乱オブザーバと一緒に使うことで、推定精度を向上させました*1。人が装着している状態のロボットに、どのような命令を出すと、どのように動くのか、をリザバーネットワークにあらかじめ学習させておくことで、ロボットの状態から人の動作意図を正しく推定することができました(図1)。
-
-
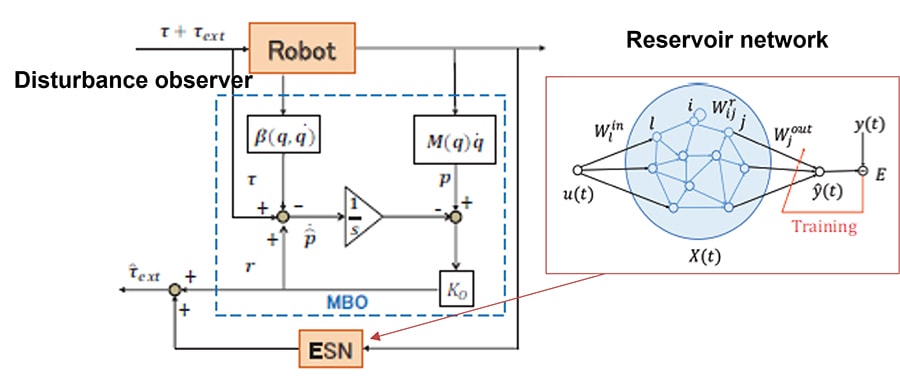
- 図1. 意図推定部の構成
-
-
-
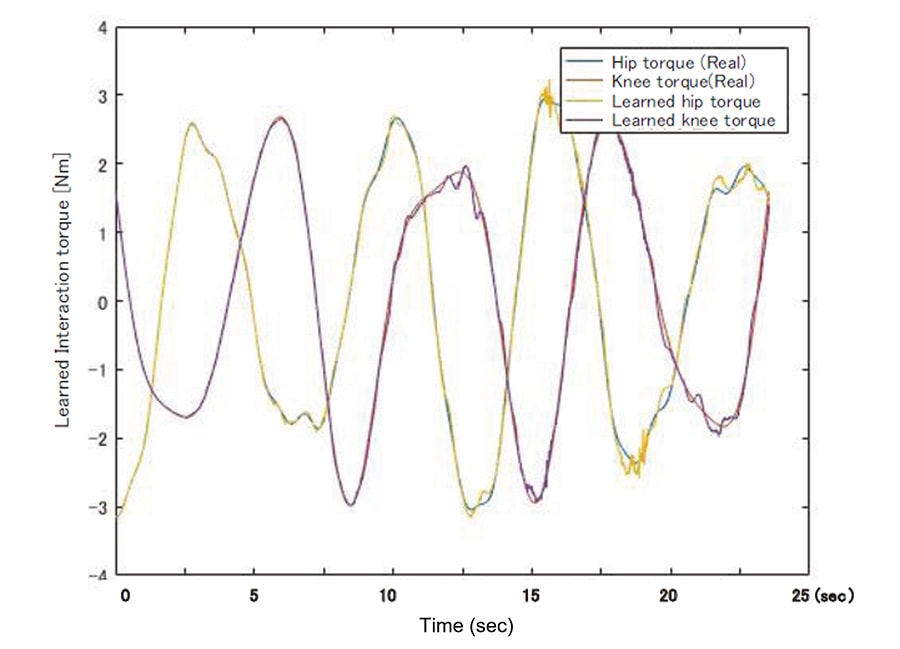
- 図2. 実験結果(干渉力の推定性能)
-
動作意図推定部で、外乱オブザーバ(Disturbance observer)に対してリザバーネットワーク(Reservoir network)ESN(Echo State Network)を組み合わせることで干渉力の推定誤差を低減した。図2は股関節トルク(Hip torque)と膝関節トルク(Knee Torque)の真値(Real)と推定値(Learned)の比較であり、両者の一致が確認できる(股関節真値 : 青色、股関節推定値 : 黄色、膝関節真値 : 藤色、股関節推定値 : 紫色)。
-なるほど。AIに学習させることで、モデルにすることが困難だった部分を補ったのですね。それでは次に、②人の動作に合わせて適切な力を人に与える機能について教えてください。
- 山下
- たとえば、あなたがウェアラブルロボットを装着して、10kgのものを持ち上げようしている時を想像してください。あなたが4kg分の力を出すならロボットは残りの6kg分の力をアシストしてくれる。必要な時に必要な分だけアシストしてくれる、このような制御方法をAssist As Needed制御(AAN制御)といいます。ウェアラブルロボットを高齢者が使用する時には、このAAN制御が利用者の力だけでは実現できない作業を可能にするだけでなく、利用者の残存機能を引き出す作用もあると期待しています。
-
-
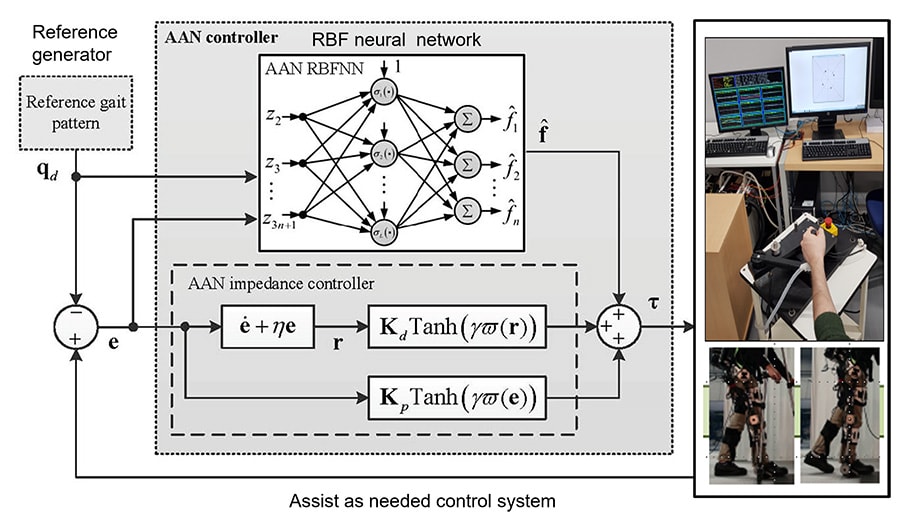
- 図3. 制御系の全体構成
-
-
-
- 図4. 実験結果(AAN性能)
-
Radial Basis Function(RBF)ニューラルネットワークに基づく適応フィードフォワードとデッドゾーン関数による非線形フィードバックからアシスト制御系を独自に構成(図3)。ウェアラブルロボット装着者が脱力している時はロボットのアシストが高く、装着者が操作している時はロボットのアシストが低いのが分かる(図4)。人の特性に適応するフィードフォワードがなにより重要。
-ここまでの話で、ロボットが①人の動作意図をくみ取り、②人の動作に合わせて適切な力を出す仕組みがわかってきました。それでは最後に、③ロボットが出す力や速度を制限する機能について教えてください。ウェアラブルロボットを装着している人にとっても、また、その周りの人にとってもロボットが思いがけない動作をしないことって大事ですよね。
- 山下
- そうなんです。急に早く動く、あるいは急に大きな力を出すロボットは安心して使えませんね。そこで、ロボットへの命令は3つのステップで作りました。1つ目のステップでは、ロボットの基本的な動作(手先や足先をどう動かすか)をある程度の速度しか出さないことを条件に作ります。2つ目のステップでは、その速度の変化が急激にならないように、速度の変化量を調節します。これで急に動き出す、あるいは急に止まるといった動きがなく、やわらかい操作感のロボットになります。さらに、ロボットが発生する力を制限することで、ウェアラブルロボットを装着する人にとっても、周りの人にとっても、安全で安心なロボットになると考えています*2*3*4。
-
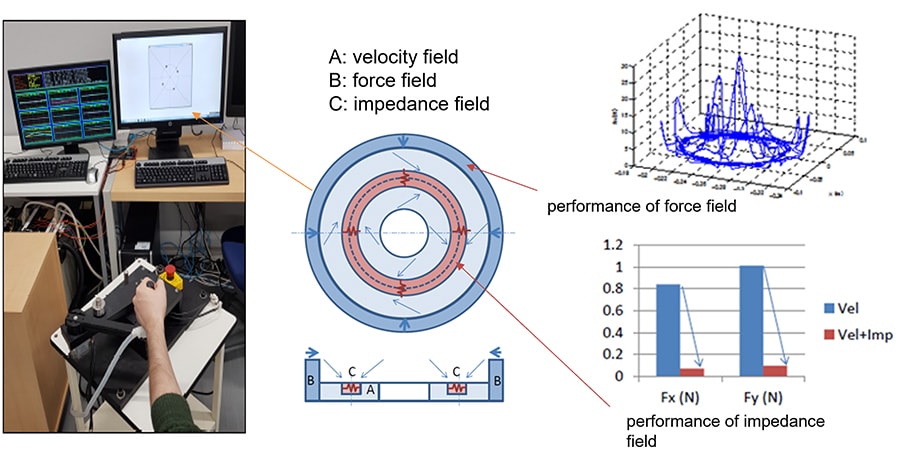
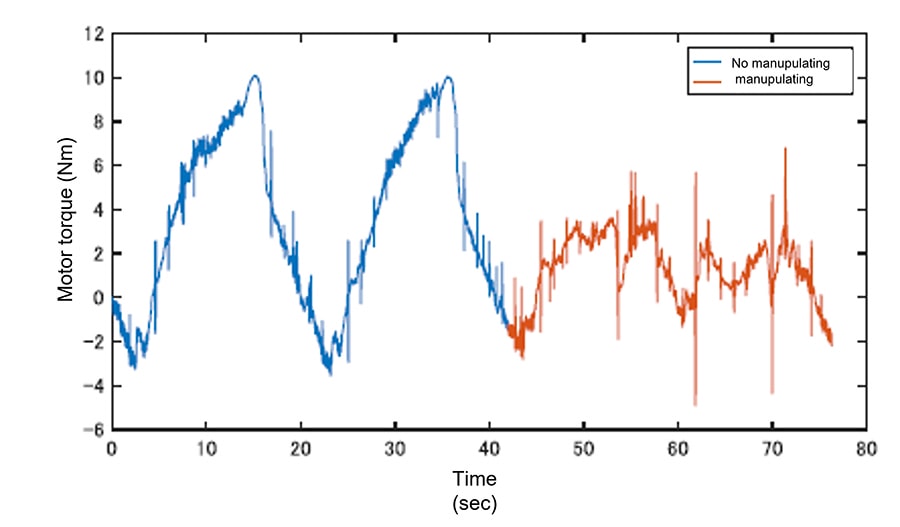
- 図5. 実験結果(力場およびインピーダンス場の性能)
ロボットの目標値はフィールド理論に基づき、速度場(A、基本性能)、力場(B、安全性)、および、インピーダンス場(C、柔軟性)の3層で構成されるフィールドにて順次生成。ウェアラブルロボットやマニピュレーター型ロボットに適用し、所望の性能が得られていることを確認。図5は、手元操作型のマニピュレーター型ロボットの例。特に速度場にインピーダンス場を付与することで、わずかな力からやわらかいアシストを実現(図5右下)。また外周に力場を付与し可動範囲に制約を加えることで安心安全性を高めた(図5右上)。
-人への安全を確保しながら、人のやりたいことを理解し、人に不足なところだけをアシストすることが大事なポイントなんですね
- 山田
- はい、その通りです。人の意のままに動くロボットをつくろうとした時、人のことをロボットが正しく理解していることが重要です。「ロボットに人が合わせる」のではなく、人がやりやすいように「人にロボットが合わせる」ためには、千差万別な人の特性を理解し、その特性に適応するロボットの機構や制御方法の研究がこれからも必要だと感じています。今回は、身体機能のアシスト技術について紹介いたしましたが、トヨタと豊田工大では心のアシスト(気分を上げるアシスト)技術の研究も進めていますので、次の機会で紹介したいと思います。
-今後の研究がとても楽しみですね、本日は大変面白い話をありがとうございます。
-
- 左から山口、山下、山田。脳とロボットと制御に興味のある3人が集まり、研究を推進しています。
参考情報
| *1 | 成清辰生、H.J.Asl、山下勝司、山口雄平、山田整、“Assist-as-Needed 制御から透過性制御への道標”, 第10回計測自動制御学会制御部門マルチシンポジウム, 3M7-3, 2023. |
|---|---|
| *2 | H.J.Asl, M.Yamashita, T.Narikiyo, M.Kawanishi, "Field-Based Assist-as-Needed Control Schemes for Rehabilitation Robots", IEEE/ASME Transactions on Mechatronics, Vol.25, Iss.4, pp.2100-2111, 2020. |
| *3 | H.J.Asl, K.Katagiri, T.Narikiyo, M.Yamashita, M.Kawanishi, "Augmenting human power by assistive robots: Application of adaptive neural networks", Elsevier Control Engineering Practice, Vol.110, 2021. |
| *4 | H.J.Asl, K.Katagiri, T.Narikiyo, M.Yamashita, M.Kawanishi, "Satisfying Task Completion and Assist-as-Needed Performance in Robotic Exoskeletons", IEEE Transactions on Medical Robotics and Bionics, Vol.3, Iss.3, pp.791-800, 2021. |
本件に関するお問い合わせ先
- 未来創生センター
- xr-probot@mail.toyota.co.jp
関連コンテンツ
アクセスランキング




